Learning Outcomes
- Derive the harmonic equivalent circuit of the IM and show that harmonic currents decay as \(I_n \propto 1/n^2\).
- Compute the additional copper losses and THD introduced by six-step harmonic voltages.
- Explain the rotating MMF directions of the 5th and 7th harmonics and predict the resulting torque-ripple frequency.
- Write down Park's transformation matrix and the \(qdo\) voltage equations in the synchronous reference frame.
- State the advantages of the synchronous frame model for controller design and harmonic analysis.
- Set up the state-space model and periodic boundary condition for exact harmonic steady-state analysis of the VSI-fed IM.
Harmonic Equivalent Circuit of the Induction Motor
For a harmonic of order \(n\), the rotor slip relative to the harmonic rotating field is:
The minus sign applies to positive-sequence harmonics (\(n = 6k+1\)) and the plus sign to negative-sequence harmonics (\(n = 6k-1\)). Since \(\omega_r \approx \omega_s\), \(s_n \approx 1\) for all significant harmonics.
- Since \(s_n \approx 1\): the referred rotor impedance \(\approx R_r + jnX_{lr}\)
- Magnetising reactance \(jnX_m \gg R_r\) → negligible harmonic air-gap flux
- Harmonic currents flow mainly through total leakage reactance: \(X_{eq} = X_{ls} + X_{lr}\)
| \(n\) | \(I_n/I_1\) | Sequence |
|---|---|---|
| 1 | 1.000 | Positive |
| 5 | 0.200 | Negative |
| 7 | 0.143 | Positive |
| 11 | 0.091 | Negative |
| 13 | 0.077 | Positive |
Harmonic Current Decay Law
Harmonic current magnitude:
Since the six-step VSI has \(V_n = V_1/n\) for all significant harmonics:
Higher-order harmonics decay very rapidly; the 5th and 7th dominate.
Voltage THD of the Six-Step Inverter
Current THD is Lower than Voltage THD
Motor leakage inductance filters harmonics according to \(I_n/I_1 \propto 1/n^2\). Typical motor current \(\mathrm{THD}_I\): 15–25% (lower than \(\mathrm{THD}_V\); depends on \(X_{eq}\) and operating speed).
Harmonic Losses & Torque Ripple in the Motor
- Additional core loss: eddy currents scale as \(n^2\); hysteresis loss as \(n\)
- Total extra heating: approximately 10–25% → motor must be thermally derated
- IEEE Std 112 recommends approximately 10% derating for six-step VSI-fed motors
Pulsating (Ripple) Torques
- 5th (negative seq.) + 7th (positive seq.) interact → torque ripple at \(6\omega_s\)
- 11th + 13th → torque ripple at \(12\omega_s\)
- Consequences: audible noise, mechanical vibration, fatigue in gear teeth, reduced bearing life
Remedy: PWM
PWM techniques (Lecture 7E) shift harmonics to sideband frequencies around the carrier \(f_c\). Motor inductance filters them effectively → current is nearly sinusoidal → motor derating reduced from ~10% to ~1–3%.
Harmonic Flux Linkages & Rotating MMF Directions
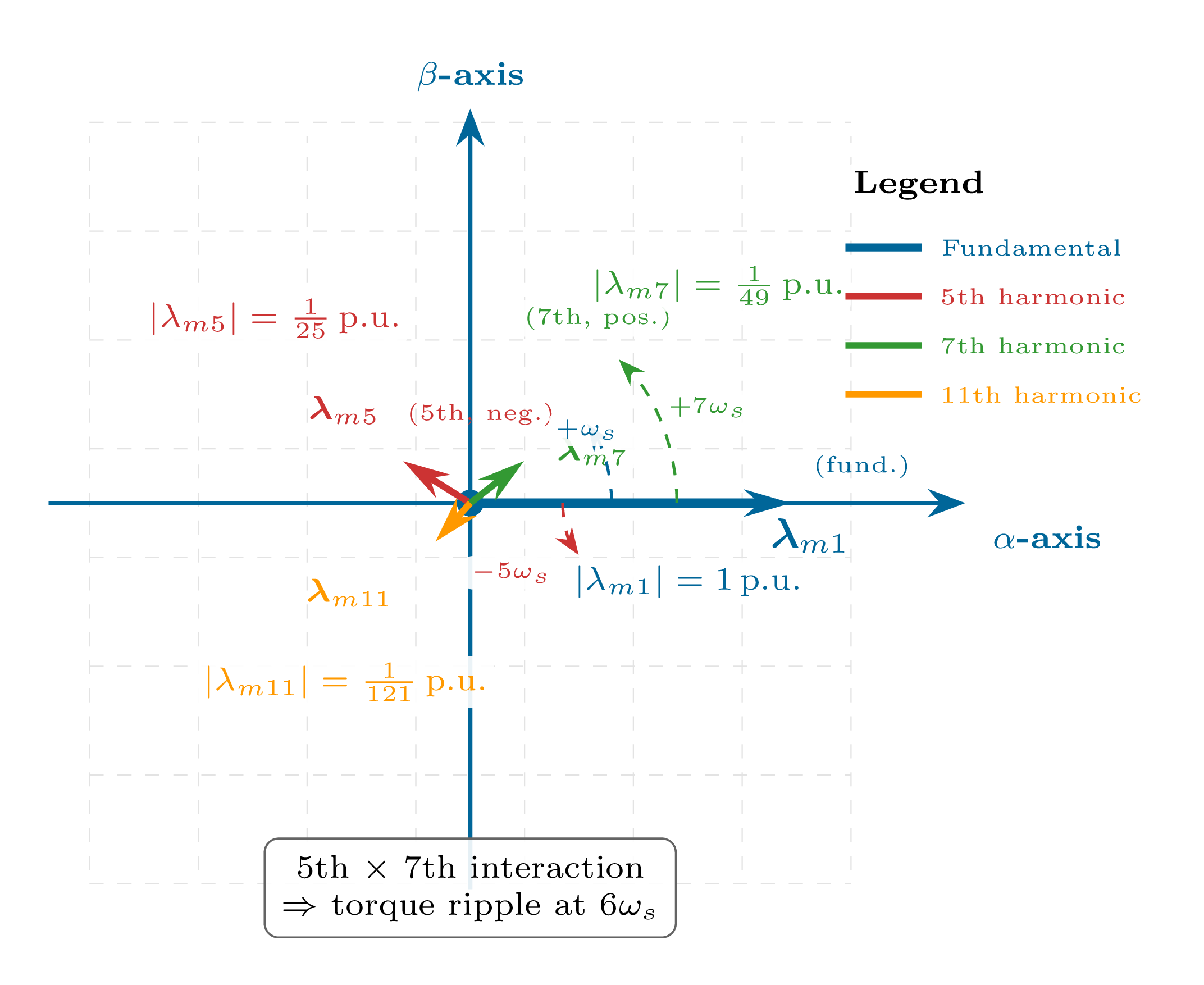
- Fundamental (\(n=1\)): Rotates at \(+\omega_s\) (forward direction)
- 5th (negative seq.): Rotates at \(-5\omega_s\) (backward). Slip \(s_5 \approx 6/5\). Produces backward air-gap flux and parasitic braking torque.
- 7th (positive seq.): Rotates at \(+7\omega_s\) (forward). Slip \(s_7 \approx 6/7\). Together with the 5th produces ripple at \(6\omega_s\).
- 11th + 13th: Produce torque ripple at \(12\omega_s\)
Harmonic MMF Sequence Rule (General)
\(n = 6k-1\): negative sequence (backward MMF)
\(n = 6k+1\): positive sequence (forward MMF), \(k = 1, 2, 3, \ldots\)
Memory aid: Alternates "−1, +1" around every multiple of 6.
Flux linkage due to harmonic \(n\) decays as:
Explicitly for the dominant 5th and 7th harmonics:
The rapid decay means harmonic flux (and thus harmonic torque) is much smaller than fundamental — the motor acts as a good low-pass filter for flux, but much less so for current.
Park's Transformation & the Synchronous Reference Frame
- In the stationary (abc) frame: all voltages and currents are AC → PI controller design is complex because PI controllers cannot track AC references without steady-state error
- Transforming to the synchronous (\(e\)) frame rotating at \(\omega_s\): fundamental quantities become DC in steady state
- Enables straightforward PI controller design (no steady-state error for DC signals)
- Zero-sequence (\(o\)) component is zero for balanced 3-phase — only \(q\) and \(d\) components needed
- Provides the mathematical basis for Field-Oriented Control (FOC)
FOC Preview
In FOC: rotor flux is aligned with the \(d\)-axis: \(\lambda_{qr}^e = 0\), \(\lambda_{dr}^e = \lambda_r\)
\(\Rightarrow\) Torque \(= K \cdot \lambda_r \cdot i_{qs}^e\) — analogous to a separately excited DC motor. Covered in detail in Chapter 8.
where \(\theta_e = \int \omega_s\,dt\) is the electrical angle of the synchronous frame. The transformation applies to any three-phase quantity \(f\) (voltage, current, or flux). In steady state, \(f_q\) and \(f_d\) are constant (DC), while harmonics appear as AC ripple superimposed on the DC values.
Advantages of the Synchronous Frame
- Steady-state variables are DC → PI controllers achieve zero steady-state error
- Basis for FOC: orient \(d\)-axis along rotor flux → \(i_{ds}^e\) controls flux; \(i_{qs}^e\) controls torque
- Same equations used for small-signal linearisation and stability analysis
- Harmonics appear as AC ripple on DC values — easily identified and filtered
QDO Voltage Equations & Electromagnetic Torque
where \(p = d/dt\), \(L_s = L_{ls} + L_m\), \(L_r = L_{lr} + L_m\), and \(\omega_{sl} = \omega_s - \omega_r\) is the slip angular frequency. The superscript \(e\) denotes synchronous frame quantities.
Electromagnetic Torque
Mechanical Equation
\(\omega_r\) = rotor mechanical speed (rad/s), \(J\) = rotor inertia (kg·m²), \(B\) = viscous friction (N·m·s/rad), \(T_l\) = load torque (N·m).
State-Space Model & Periodic Steady-State Solution
The \(qdo\) equations can be written in the standard state-space form:
- Six-step VSI applies periodic switching at \(T_s/6\) intervals
- Voltage vector \(\mathbf{u}\) is piecewise-constant in each 60° interval
- Exact solution within interval \(k\) via the matrix exponential:
Periodic Boundary Condition
Due to the 3-phase symmetry of the six-step pattern, the state at the end of each 60° interval is a rotated version of the state at the beginning:
where \(S_1\) is the \(60°\) rotation (transition) matrix. Solving for \(\mathbf{x}(0)\) yields the exact periodic steady state in one linear solve.
60° Boundary Rotation Matrix \(S_1\)
Each 60° switching advance rotates both the stator and rotor current vectors by \(-60°\) in the synchronous frame. The block-diagonal structure reflects the decoupled \(q\)- and \(d\)-axis pairs.
What the Periodic Steady-State Solution Provides
- Phase currents \(i_{as}(t)\): full waveform including all harmonic content
- Instantaneous and average electromagnetic torque
- RMS currents, harmonic copper losses, and efficiency
- Torque ripple magnitudes at \(6\omega_s\) and \(12\omega_s\)
- Input displacement power factor
Computational advantage: True periodic steady state (all harmonic effects) obtained in a single matrix inversion — orders of magnitude faster than transient time-domain simulation.