Learning Outcomes
- Explain why PWM shifts low-order harmonics to sideband frequencies and how motor inductance filters them.
- Calculate the fundamental output voltage of an SPWM inverter given modulation index \(m_a\) and DC bus voltage \(V_{dc}\).
- Describe third-harmonic injection and quantify its DC-bus utilisation improvement over basic SPWM.
- State the SHE transcendental equations for eliminating the 5th and 7th harmonics and describe how they are solved.
- Draw the SVM hexagon, label all eight voltage vectors, and compute dwell times \(T_1\), \(T_2\), \(T_0\) for a given reference.
- Compare SPWM, SHE, and SVM on THD, DC utilisation, switching loss, and implementation complexity.
Motivation: From Six-Step to PWM
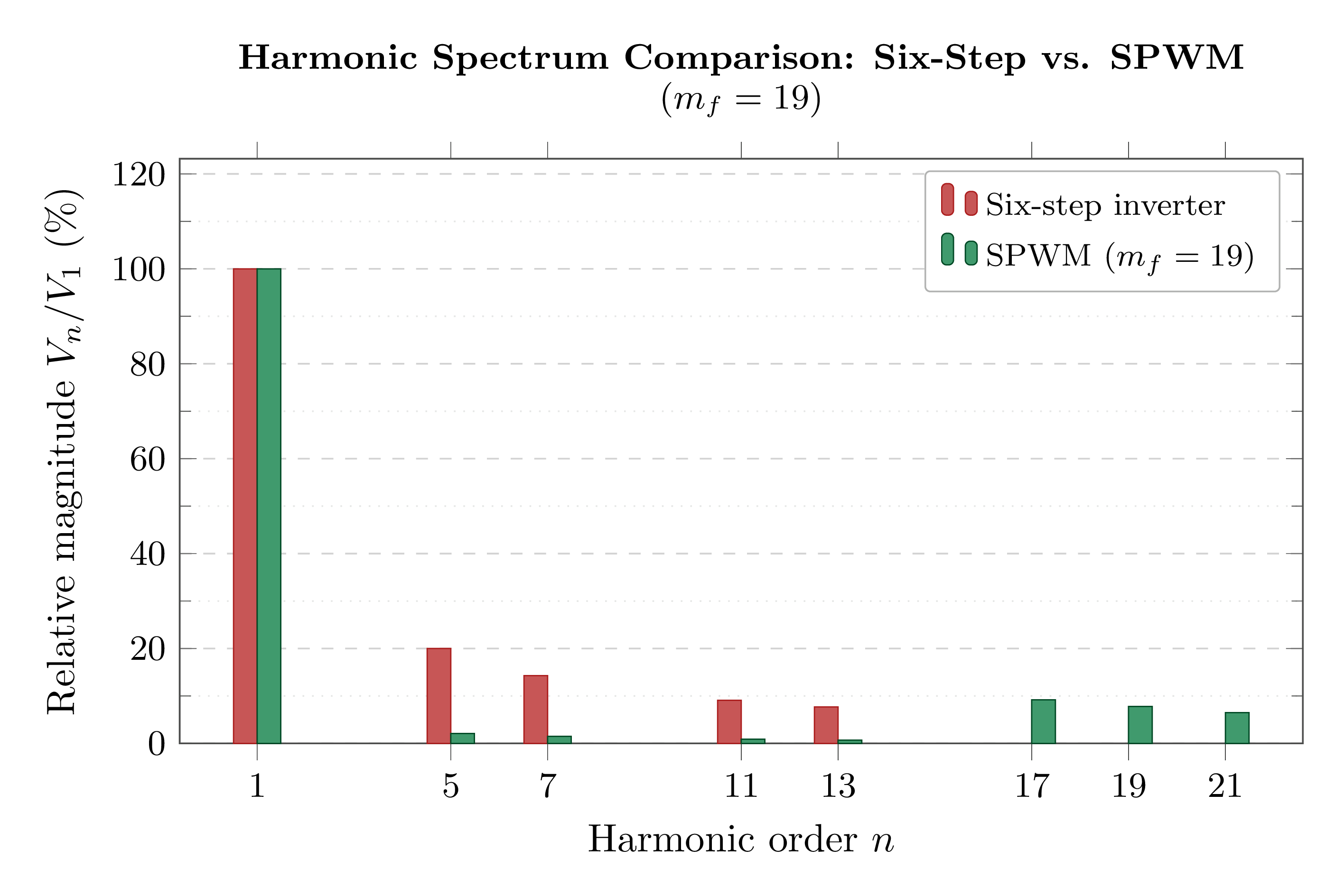
Problems with Six-Step VSI:
- Large 5th and 7th harmonic voltages (20% and 14% of fundamental)
- Motor heating, derating (~10%), and audible noise
- Torque ripple at \(6\omega_s\) — problematic in precision drives
- \(\mathrm{THD}_V \approx 28\%\); IEEE 519 line limit is 5%
PWM Principle:
- Vary pulse widths so the fundamental is preserved but harmonics are pushed to much higher frequencies
- Motor leakage inductance naturally filters high-frequency harmonics → near-sinusoidal current
- Key trade-off: higher \(f_{sw}\) → better harmonics but more switching losses and EMI
Sideband Harmonic Locations for SPWM
Harmonics appear at: \((m_f \pm 2)f_s\), \((2m_f \pm 1)f_s\), \((3m_f \pm 2)f_s\), etc. Motor inductance filters these effectively at \(f_c \gt 1\) kHz, yielding smooth, near-sinusoidal current.
- SPWM — Sinusoidal PWM: Simplest and most common; compares sine reference with triangular carrier
- SPWM+3H — SPWM with Third-Harmonic Injection: Extends the linear modulation range; improves DC utilisation to 90.7%
- SHE — Selected Harmonic Elimination: Pre-computed switching angles that analytically eliminate specific harmonics; offline computation, lookup table in real time
- SVM — Space Vector Modulation: Uses the voltage space vector hexagon concept; highest DC utilisation (90.7%); most common in DSP-based drives
Sinusoidal Pulse-Width Modulation (SPWM)
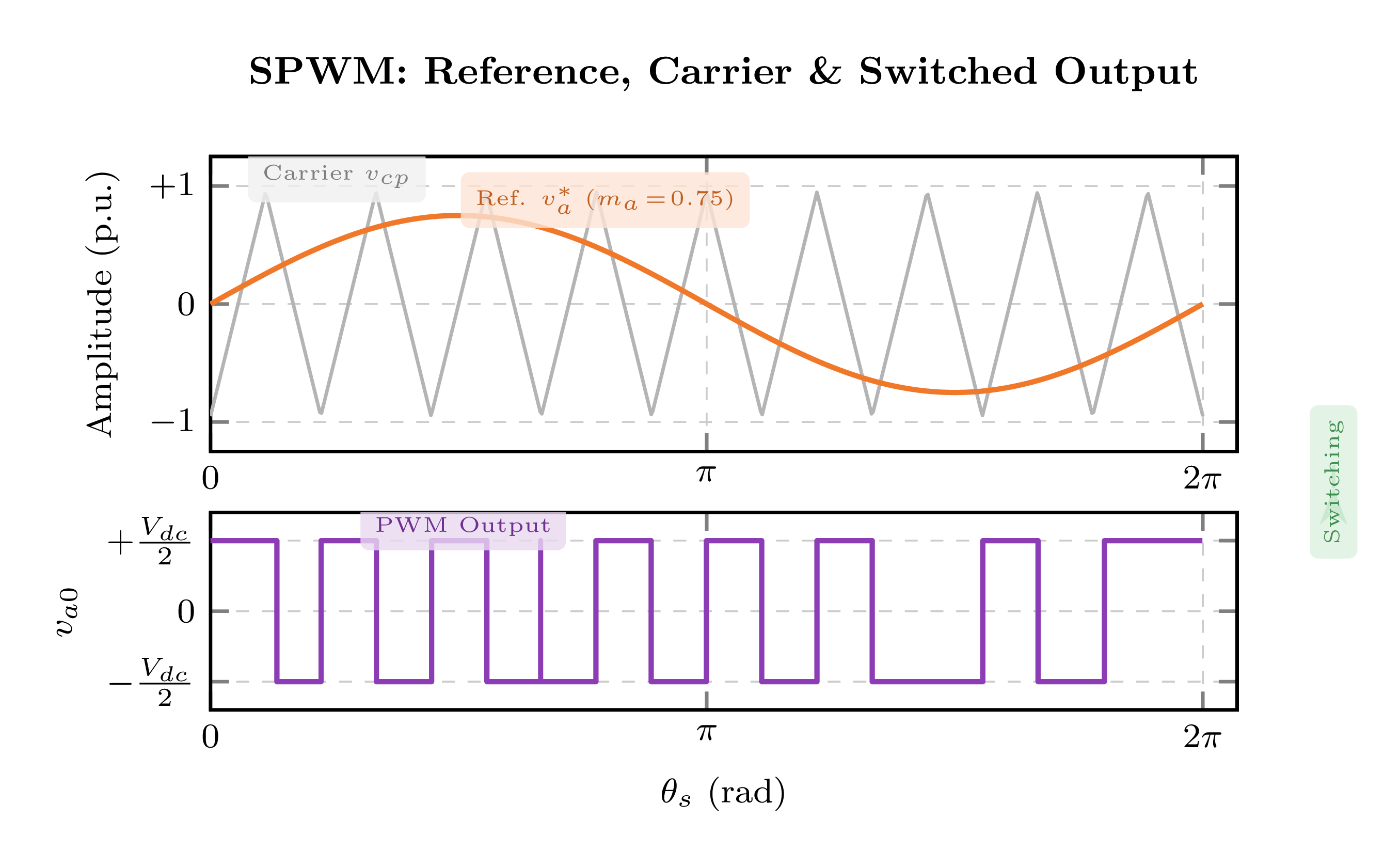
- Reference: sinusoidal \(v_a^*(t) = m_a\,\hat{V}_{cp}\sin(\omega_s t)\)
- Carrier: triangular waveform at \(f_c = m_f \cdot f_s\)
- \(v_a^* > v_{cp}\): upper IGBT ON (\(+V_{dc}/2\))
- \(v_a^* < v_{cp}\): lower IGBT ON (\(-V_{dc}/2\))
- Pulse widths vary sinusoidally → fundamental preserved
SPWM Key Parameters
Modulation index: \(m_a = \hat{v}_a^*/\hat{v}_{cp}\), \(\;0 \leq m_a \leq 1\)
Frequency ratio: \(m_f = f_c/f_s\) (odd integer preferred)
Output fundamental (pole voltage peak):
Linear range: \(0 \leq m_a \leq 1\); DC bus utilisation: 78.5%
- \(m_f\) should be an odd integer — avoids even-order harmonics (ensures half-wave symmetry)
- \(m_f\) should be a multiple of 3 — triplen harmonics in pole voltage cancel in line voltages
- Recommended values: \(m_f = 9,\;15,\;21,\;\ldots\) (odd multiples of 3)
- Above \(m_f \approx 9\), the harmonic performance is nearly independent of \(m_f\) — the dominant factor becomes \(m_a\)
Third-Harmonic Injection (SPWM + 3H)
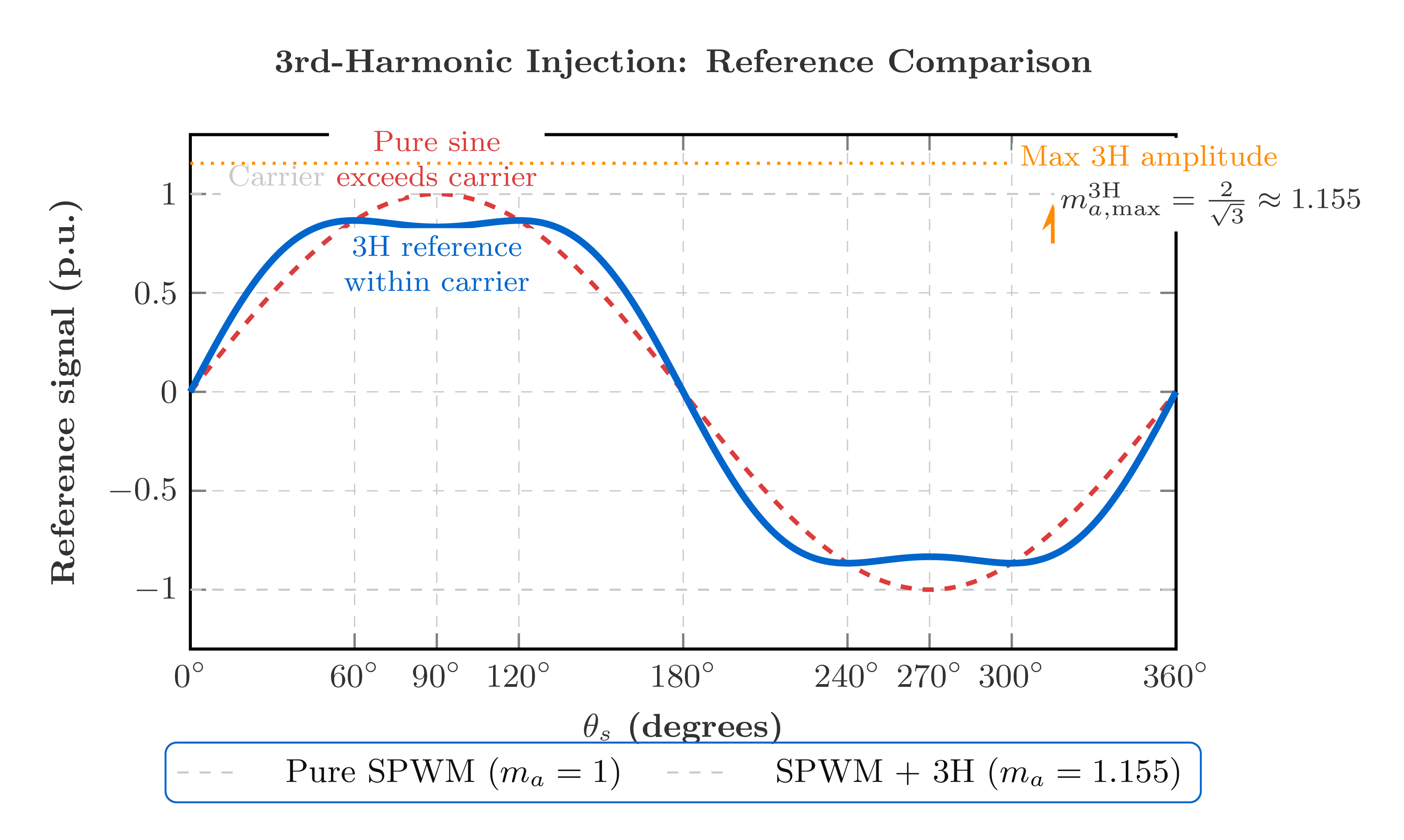
- In a balanced 3-phase system, a third-harmonic component in the reference is common-mode: it appears identically in all three phase references
- Common-mode voltage does not appear in line-to-line voltages (it cancels by subtraction)
- Adding a 3rd harmonic term allows phase references to exceed the carrier peak before line voltages become distorted → linear range is extended
Third-Harmonic Injection Reference Signal
The optimum injection ratio is 1/6 (equivalently \(\frac{1}{2\sqrt{3}} \approx 0.289\)). This is the value that maximally flattens the reference peak and gives the greatest extension of the linear range.
Maximum Linear Modulation Index
This is a 15.5% increase over the SPWM maximum of 1.0, directly translating into higher output voltage for the same DC bus.
DC Bus Utilisation: 90.7%
This equals the SVM utilisation, making SPWM+3H equivalent to SVM in the linear modulation range. SPWM+3H is simpler to implement in analog hardware, while SVM is more natural for DSP-based digital control.
| Feature | SPWM | SPWM+3H |
|---|---|---|
| Max. linear \(m_a\) | 1.000 | 1.155 |
| DC bus utilisation | 78.5% | 90.7% |
| Line voltage THD | ~10% | ~8% |
| Complexity | Low | Low+ |
| Equivalent to | — | SVM (in linear range) |
Selected Harmonic Elimination (SHE) PWM
SHE selects switching angles in advance to simultaneously control the fundamental voltage amplitude and analytically cancel selected low-order harmonics. For a quarter-wave symmetric waveform with \(N\) switching angles \(\alpha_1 < \alpha_2 < \cdots < \alpha_N\) in the range \(0° < \alpha_i < 90°\), the Fourier coefficients of the \(n\)th harmonic can be made zero.
Typical design goal: Eliminate 5th and 7th harmonics with 3 switching angles per quarter period:
These are three transcendental equations in three unknowns. They have no closed-form solution and are solved numerically (e.g., Newton-Raphson) for each desired \(m_a\). The angle sets are pre-computed and stored in lookup tables indexed by \(m_a\).
SHE Advantages
- Analytically eliminates specified low-order harmonics (5th, 7th, 11th, etc.)
- Achieves very low line-voltage THD (<5%) with minimal switching events
- Lower switching frequency than SPWM → reduced switching losses
- Preferred for GTO/IGCT-based high-power drives where switching loss is critical
SHE Limitations
- Offline computation required; angles stored as lookup tables indexed by \(m_a\)
- Dynamic response limited by lookup table update rate
- DC bus utilisation limited to 78.5% (same as basic SPWM without 3H injection)
- Cannot directly extend to overmodulation as easily as SVM
Space Vector Modulation (SVM)
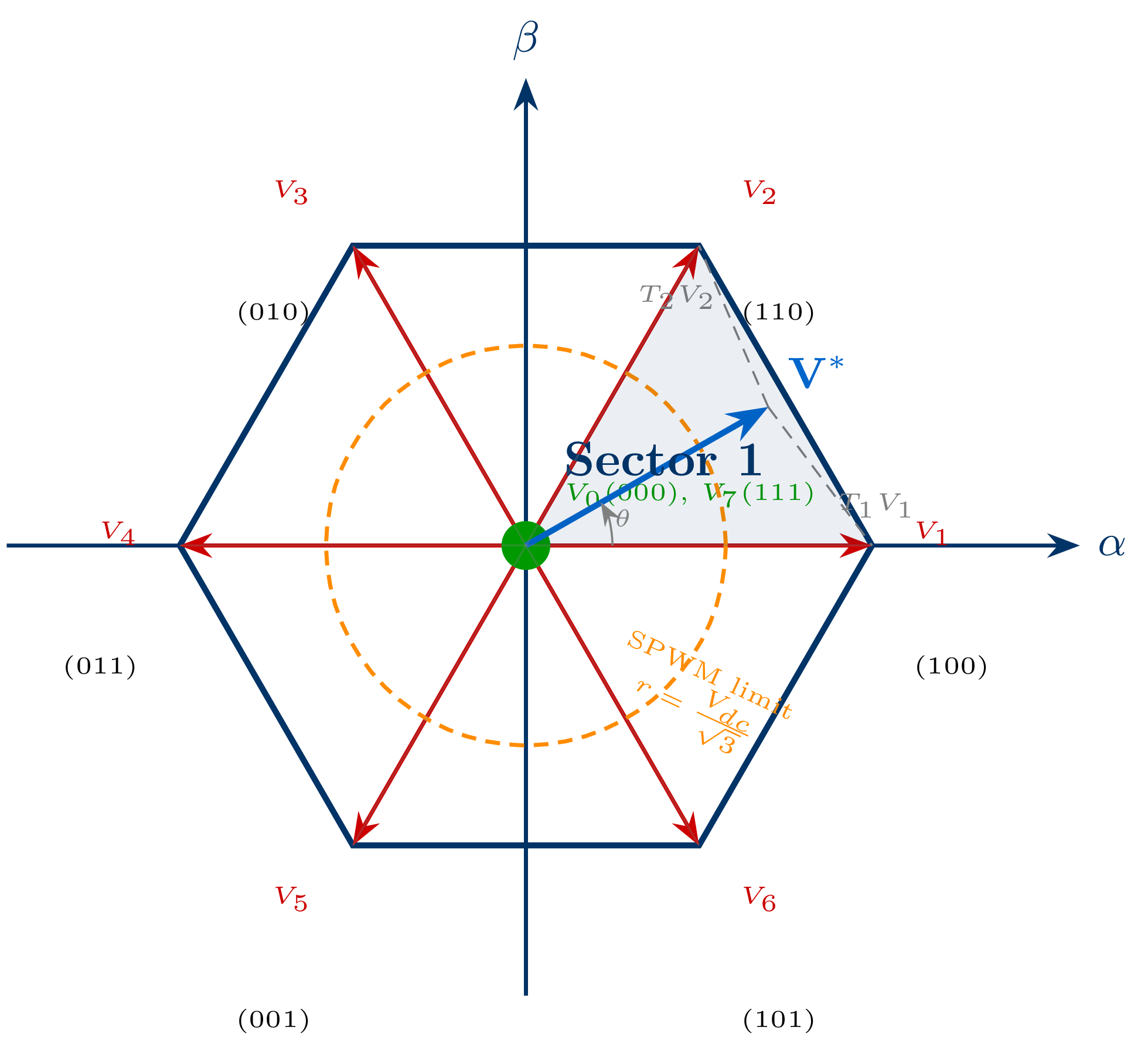
- Three-phase VSI has \(2^3 = 8\) possible switch states
- 6 active vectors (\(V_1\)–\(V_6\)) at 60° intervals in the \(\alpha\beta\) complex plane
- 2 zero vectors (\(V_0\) = 000, \(V_7\) = 111): output voltage = 0
- Reference \(\mathbf{V}^*\) synthesised by time-averaging adjacent active vectors plus zero vectors within each switching period \(T_s\)
Dwell-Time Equations (Sector 1, \(0° \leq \theta < 60°\))
where \(m_a\) is the SVM modulation index (normalised reference magnitude) and \(\theta\) is the angle of \(\mathbf{V}^*\) within the sector.
Maximum Linear Modulation Index
Alternatively expressed as: the maximum length of \(\mathbf{V}^*\) that remains inside the hexagon is \(V_{dc}/\sqrt{3}\), corresponding to 90.7% of the maximum six-step fundamental \(2V_{dc}/\pi \cdot (\pi/2\sqrt{3}) = V_{dc}/\sqrt{3}\).
SVM vs. SPWM Advantages
- 15% higher DC bus voltage utilisation (90.7% vs. 78.5%)
- Lower current THD for same switching frequency
- Fewer switch transitions per cycle (optimised zero-vector placement)
- Natural for DSP/FPGA implementation using look-up tables or direct computation
- Seamless extension to field-oriented control
- Mathematically equivalent to SPWM with optimum 3H injection
PWM Method Comparison
| Method | Low-Order Harmonics | Bus Utilisation | THD (line V) | Switching Loss |
|---|---|---|---|---|
| Six-step | High (20%, 14%) | 78.5% | 28% | Very low |
| SPWM | Moved to sidebands | 78.5% | ~10% | Medium |
| SPWM+3H | Moved to sidebands | 90.7% | ~8% | Medium |
| SHE | Analytically eliminated | 78.5% | <5% | Low |
| SVM | Moved to sidebands | 90.7% | ~8% | Medium |
Practical Selection Guide
- Low power (<15 kW): SPWM is standard; simplest to implement
- General industrial drives: SVM preferred — best DC utilisation, DSP-friendly, integrates with FOC
- High power (GTO/IGCT-based): SHE — minimal switching loss; offline angle computation acceptable
- Medium-voltage drives (>2 MW): Multi-level converters (NPC, flying capacitor, cascaded H-bridge)
Multi-Level Inverters for Medium Voltage
For >2 MW or medium-voltage applications, NPC (Neutral Point Clamped), flying capacitor, and cascaded H-bridge topologies offer much better harmonic performance and reduced \(dv/dt\) stress on motor windings. Each device blocks only \(V_{dc}/(N-1)\), enabling higher voltage operation with standard voltage-rated IGBTs.
Carrier Frequency Scheduling
Low output frequencies (\(f_s < 40\) Hz):
- Carrier synchronised to output (\(m_f\) = odd integer, multiple of 3)
- Prevents sub-harmonic torque ripple that would otherwise cause unacceptable noise and vibration
- As \(f_s\) increases, \(m_f\) is stepped down in discrete jumps (e.g., 27, 21, 15, 9)
High output frequencies (\(f_s > 40\) Hz):
- Carrier fixed at \(f_c \approx 4\)–10 kHz (free-running, asynchronous)
- Harmonic performance is acceptable because \(m_f\) remains large enough
- Smooth transition at the crossover frequency (\(\approx 40\) Hz)