Overview of Direct Vector Control
Direct Vector Control — Defining Characteristic
What Makes It ``Direct''
In direct vector control, the field angle \(\thetaf\) is obtained
by measuring or directly computing the flux linkages from
terminal electrical quantities or dedicated sensors.
No knowledge of the rotor position is strictly required.
Block Structure with Current-Source Inverter
- Speed error through PI controller \(\to\) torque command \(T_e^*\)
- Flux reference \(\lambdar^*\): held at rated value up to base speed; reduced inversely with speed above base (field weakening)
- Vector controller generates \(\ifld^*\), \(\iT^*\), and \(\theta_s^*\)
- CSI enforces the current commands directly
Field-Weakening Strategy
\[
\lambdar^* =
\begin{cases}
\lambda_b & 0 \le \omegar \le \omega_b \\[4pt]
\dfrac{\omega_b}{|\omegar|}\lambda_b & |\omegar| > \omega_b
\end{cases}
\]
- Keeps induced EMF within the inverter voltage limit
- Extends the speed range at reduced flux
Block Diagram — Direct Vector Controller with CS
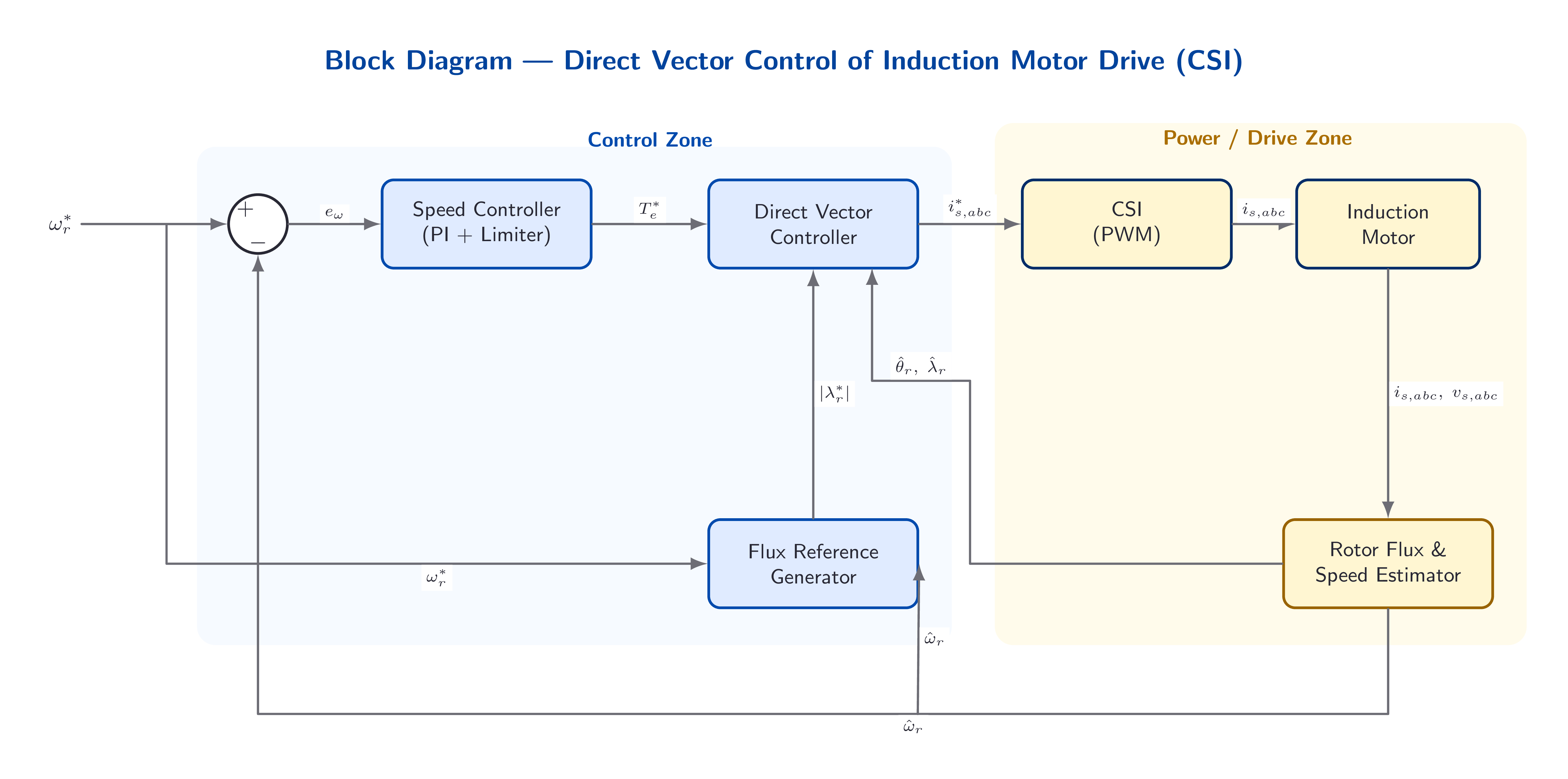
- The flux estimator returns both \(|\lambdar|\) and the field angle \(\thetaf\)
- All inner-loop feedback paths operate at high bandwidth
Flux Estimation Methods
Voltage Model
Flux Estimation — Voltage Model (Terminal Quantities)
Stator Voltage Equations in the Stationary Frame
\[
v_{qs}^s = \Rs\,i_{qs}^s + \frac{d\lambda_{qs}^s}{dt}, \qquad
v_{ds}^s = \Rs\,i_{ds}^s + \frac{d\lambda_{ds}^s}{dt}
\]
\[
\lambda_{qs}^s = \int\!\left(v_{qs}^s - \Rs\,i_{qs}^s\right)\mathrm{d}t, \qquad
\lambda_{ds}^s = \int\!\left(v_{ds}^s - \Rs\,i_{ds}^s\right)\mathrm{d}t
\]
\[
\lambda_{qr}^s = \frac{\Lr}{\Lm}\!\left(\lambda_{qs}^s - \sigma\Ls\,i_{qs}^s\right), \qquad
\lambda_{dr}^s = \frac{\Lr}{\Lm}\!\left(\lambda_{ds}^s - \sigma\Ls\,i_{ds}^s\right)
\]
Field Angle Computation
\[
\thetaf = \tan^{-1}\!\!\left(\frac{\lambda_{qr}^s}{\lambda_{dr}^s}\right), \qquad
|\lambdar| = \sqrt{(\lambda_{qr}^s)^2 + (\lambda_{dr}^s)^2}
\]
Limitation at Low Speed
At low speed, \(v_s \approx \Rs i_s\), so errors in \(\Rs\) dominate the flux estimate. Temperature rise of 100\,°C can double the winding resistance.Sensing Coils and Hall Sensors
Flux Estimation — Sensing Coils and Hall-Effect Sensors
Flux-Sensing (Search) Coils
- Two sets of search coils placed in stator slots, \(90°\) electrically displaced
- Induced EMF proportional to the rate of change of stator flux:
\[ \lambda_{qs} = \int e_{qs}\,\mathrm{d}t, \quad \lambda_{ds} = \int e_{ds}\,\mathrm{d}t \]
- No \(\Rs\) dependence — accurate at all speeds
- Galvanically isolated from the power circuit
- Requires integration; sensitive to offset and drift
Hall-Effect Sensors
- Placed in the air gap to measure flux density \(B\) directly
- Provide instantaneous flux — no integration required
- Give both magnitude and angle of the flux phasor
- Mechanically fragile and limited in thermal range
- Suitable for well-designed motor housings
Comparison of Flux Estimation Methods
| Method | Speed range | \(\Rs\) dependent | Remarks |
| Voltage model | Low speed problematic | Yes | Simple; needs compensation |
| Search coils | All speeds | No | Requires integrator circuit |
| Hall sensors | All speeds | No | Fragile; air-gap access needed |
Direct Vector Control with Voltage-Source Inverter
Current Regulation
Implementation with Voltage-Source Inverter
Current Regulation via VSI
- Current commands \(i_{qs}^{e*}\) and \(i_{ds}^{e*}\) generated by the vector controller
- \(dq\) current errors produce voltage commands \(v_{qs}^{e*}\) and \(v_{ds}^{e*}\)
- Inverse transform (\(e \to s\) frame) converts to three-phase voltage commands
- VSI synthesises the commanded voltages via PWM
Cross-Coupling in the Synchronous Frame
The stator voltage equations contain coupling terms:
\begin{align*}
v_{qs}^e &= (R_s + \sigma L_s p)\,\iqs + \omegas\sigma L_s\,\ids
+ \omegas\frac{\Lm}{\Lr}\lambdar \\[3pt]
v_{ds}^e &= (R_s + \sigma L_s p)\,\ids - \omegas\sigma L_s\,\iqs
\end{align*}
Feed-Forward Decoupling
Cross-coupling terms are cancelled by feed-forward:- Feed-forward voltage \(\omegas\sigma\Ls\ids\) added to \(q\)-axis reference
- Feed-forward voltage \(\omegas\sigma\Ls\iqs\) subtracted from \(d\)-axis reference
- Back-EMF term \(\omegas(\Lm/\Lr)\lambdar\) also cancelled
Space Vector Modulation
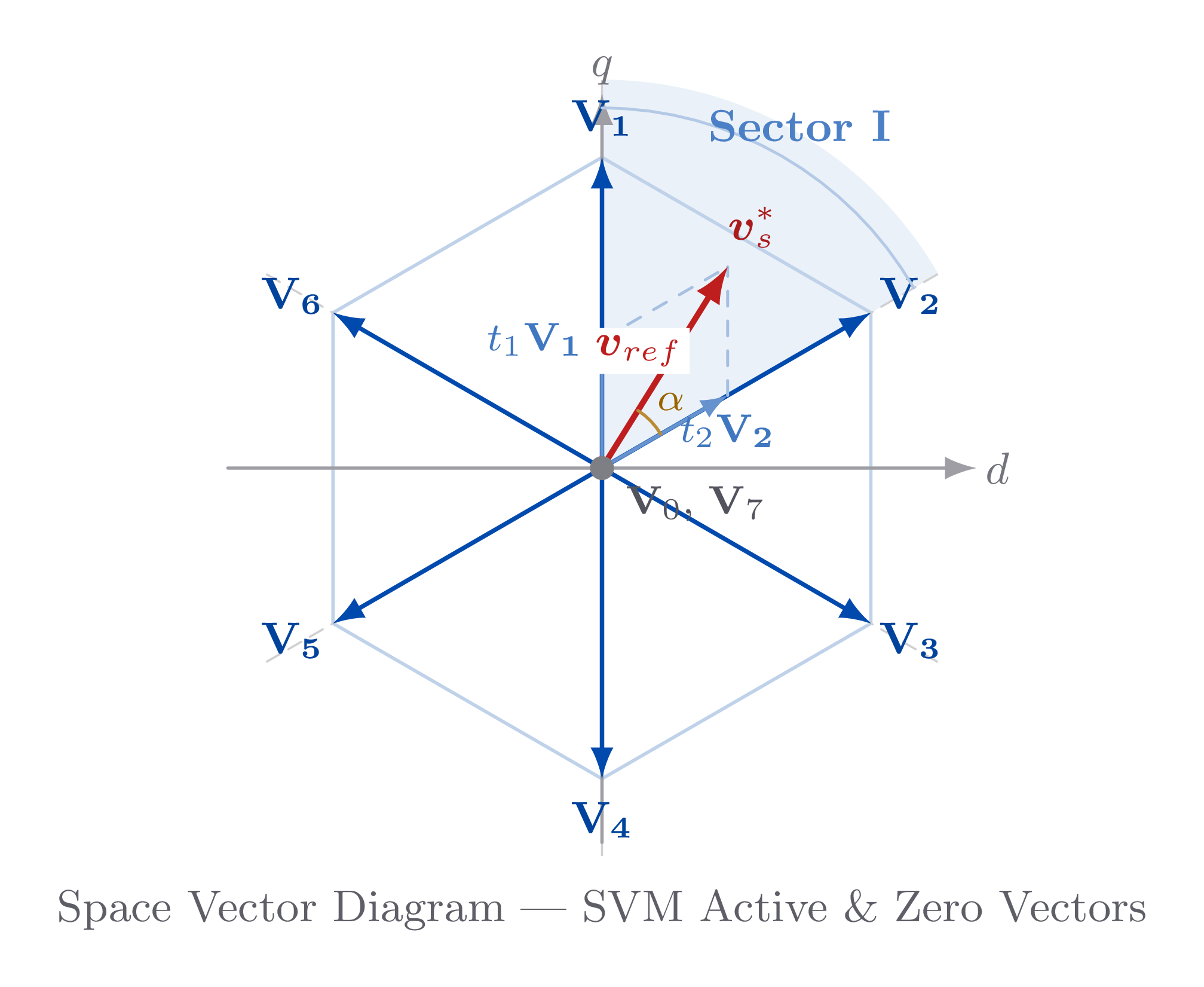
Principle of SVM
- A three-phase VSI produces six active and two zero voltage vectors forming a regular hexagon
- The desired voltage vector \(v_s^*\) is synthesised from the two adjacent active vectors weighted by duty cycles
- The remaining switching period uses zero vectors
- Duty cycles determined by projection of \(v_s^*\) onto the two nearest vectors
Advantages over Carrier-Based PWM
- Higher fundamental voltage capability\newline (up to \(V_{dc}/\sqrt{3}\) vs.\ \(V_{dc}/2\))
- Minimised switching losses for given switching frequency
- Lower voltage and current ripple
- Direct digital implementation; no explicit carrier needed
SVM — Flux Trajectory Control
Stator-Flux-Based Switching Selection
- The desired stator flux \(\lambdas^*\) has magnitude \(\lambda_s\) and position \(\theta_{fs}\) within one of six sextants
- The influencing voltage vector is identified from the current sextant position
- Two adjacent vectors applied as time fractions within the switching period to track the reference trajectory
- Zero vectors inserted to complete the period
Torque Control via Flux Trajectory
- Air-gap torque: \(\Te \propto |\lambdas|\cdot|\lambdar|\sin\delta\) where \(\delta\) is the load angle
- Controlling \(|\lambdas|\) and its rotational rate (via voltage vector selection) directly controls torque
- This principle forms the basis of Direct Torque Control (DTC)
Stator-Resistance Sensitivity and Compensation
Effect of Stator Resistance Variation
Stator-Resistance Sensitivity
Effect of \(\Rs\) Variation on Flux Estimation
- The voltage-model estimator uses:
\[ \hat{\lambda} = \int\!\left(v_s - \hat{R}_s\,i_s\right)\mathrm{d}t \]
- At low speed: \(v_s \approx \hat{R}_s i_s\), so an error in \(\hat{R}_s\) dominates the flux estimate
- Temperature rise of 100°C can double the winding resistance
- \(\Rs\) mismatch causes:
- Flux magnitude error
- Torque magnitude error
- Field angle \(\thetaf\) drift
- Instability is possible at very low speeds
Instability Mechanism
Under rapidly decreasing \(\Rs\) (e.g.\ motor cooling):- Estimated \(\hat{R}_s > R_s\) actual
- Flux estimate diverges from true value
- Torque oscillates uncontrollably
- Stator current may saturate the inverter
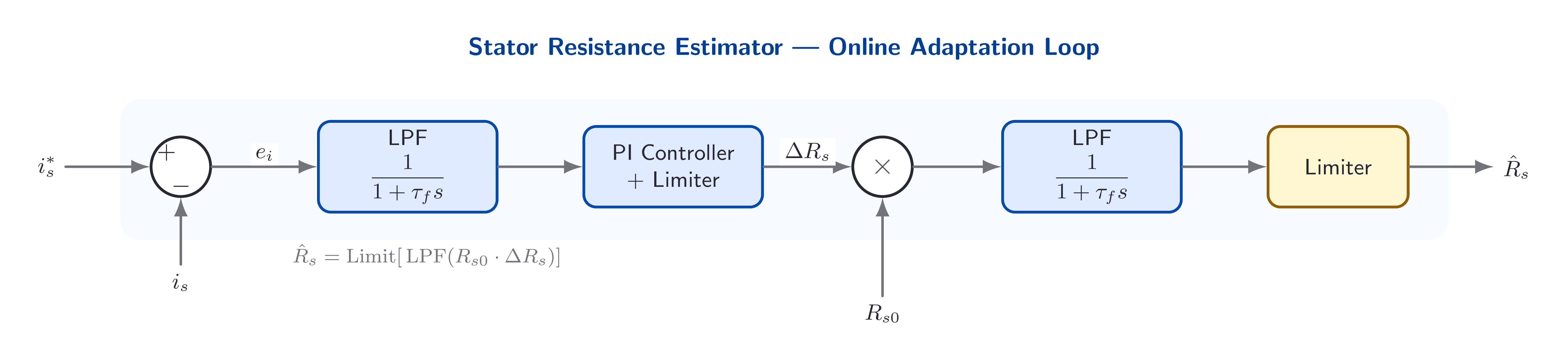
Adaptive Compensation
Adaptive Stator-Resistance Compensator
Operating Principle
- The error between the commanded current \(i_s^*\) and the actual current \(i_s\) is filtered and processed through a PI controller
- The PI output \(\Delta R_s\) updates the estimated resistance:
\[ \hat{R}_s = R_{s0} + \Delta R_s \]
- A low-pass filter removes high-frequency PWM noise
- A second filter and limiter prevent windup and oscillatory behaviour in the adaptation loop
Adaptive Compensator
Result
The adaptive compensator tracks \(\Rs\) changes continuously, maintaining stable torque control throughout the flux-weakening speed range.Summary
Key Points
- The field angle is obtained directly from flux measurement: voltage model, search coils, or Hall sensors
- Compatible with both CSI and VSI inverters
- VSI implementation requires feed-forward decoupling of cross-coupling terms
- SVM offers superior modulation quality compared to carrier-based PWM
- The principal weakness is \(\Rs\) sensitivity of the voltage model at low speed
- Adaptive compensation restores performance across the full operating temperature range
Next Lecture — Indirect Vector Control
- No flux sensors required
- Field angle computed from rotor position and estimated slip angle
- More widely used in industrial drives
- Sensitivity shifts from \(\Rs\) to rotor parameters
Key Distinction
Direct VC is preferred when low-speed performance is essential and hardware sensor integration is feasible. It eliminates parameter uncertainty in the torque loop at the cost of flux sensor hardware.