Four-Lecture Series — Road Map
- L1 [This lecture] — Speed-control overview · SCR power circuit · reversible controller · induction motor power flow · waveform analysis · steady-state analysis · torque stability · torque–speed characteristics
- L2 — Load interaction · thermal limits · power factor · closed-loop cascade control · efficiency · applications
- L3 — Slip-energy recovery (SER): circuit, equivalent model, \(T_e\)–\(I_{dc}\) analogy, harmonics, supply-side distortion, ratings, closed-loop control
- L4 — Static Scherbius drive · supersynchronous operation · industrial and wind (DFIG) applications · reactive power control · unified comparative summary
After this lecture you should be able to:
- Identify the three approaches to IM speed control and their trade-offs
- Explain air-gap power partition and the \((1-s)\) efficiency ceiling
- Describe SCR voltage waveforms for varying firing angle \(\alpha\)
- Explain the role of firing angle \(\alpha\) in a phase-controlled drive
- Describe the reversible controller and its operational quadrants
- State the torque stability criterion and identify the stable operating region
- Derive conduction angle \(\beta\) from the transcendental equation
- Compute normalised torque–speed characteristics for a given \(\alpha\)
Speed Control of Induction Motors — Overview
Speed is controlled by varying pole count \(P\), supply frequency \(f_s\), or slip \(s\):
Rewire stator windings to change pole count. Provides discrete speed steps (2–3 levels) with no continuous control. Rarely used in modern drives.
Vary \(V_s\) via SCRs. Efficiency ceiling: \(\eta \leq (1-s)\). Simple circuit; poor efficiency at low speed.
Focus of Lectures 1–2.
Variable-frequency PWM inverter. High efficiency at all speeds. Dominant modern approach (V/f, FOC, DTC).
This series focuses on phase-controlled drives — relevant for large wound-rotor machines and soft-starters.
Power Flow in the Induction Motor — The Air-Gap Partition
Air-gap power splits with slip:
Torque–air-gap power link:
where \(\omega_s\) is the synchronous mechanical speed.
Rotor copper loss \(= s\,P_{ag}\) rises linearly with slip. Even with ideal stator and zero core losses:
Reducing speed means higher slip; efficiency falls in direct proportion.
Why this matters for drives:
- Resistor control: \(sP_{ag}\) dissipated in external resistors.
- Phase (SCR) control: \(sP_{ag}\) dissipated in the rotor only.
- SER (Lecture 3): \(sP_{ag}\) is recovered and returned to the supply \(\Rightarrow\) \(\eta \gg (1-s)\).
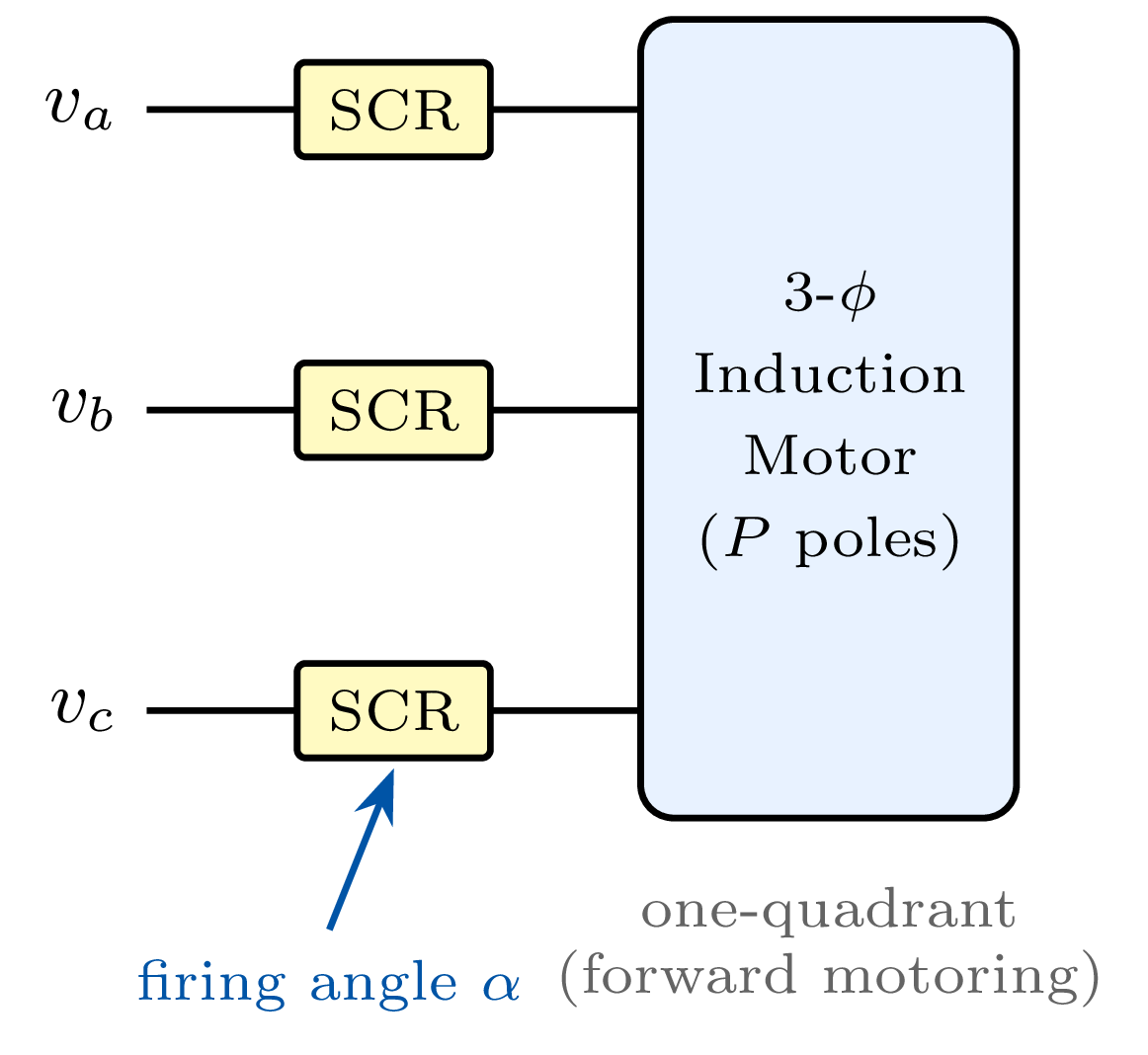
Power Circuit of the Phase-Controlled IM Drive
Operating principle:
- Power switches (SCR or TRIAC) placed in series with each stator phase.
- Each gate pulse is delayed by firing angle \(\alpha\) with respect to the natural commutation point of the phase voltage.
- For \(\alpha > \phi\) (motor power-factor angle), the switch conducts for a partial conduction angle \(\beta < 180°\), reducing the rms stator voltage.
- Three back-to-back SCR pairs (or TRIACs) control all three phases simultaneously.
Reversible controller:
- Two anti-parallel SCR groups allow Quadrants I and III operation.
- A dead-time blanking interval prevents simultaneous conduction (shoot-through protection).
Waveform Analysis — Steady-State via Thévenin Equivalent
Thévenin equivalent (referred to stator):
Instantaneous stator current (phase \(a\)):
valid for \(\omega t \in [\alpha,\;\alpha+\beta]\), where \(V_m=\sqrt{2}\,V_s\) is the peak phase voltage.
Conduction Angle and Normalised Stator Voltage
Setting \(i_s(\alpha+\beta)=0\):
Transcendental in \(\beta\); solved iteratively by Newton–Raphson.
Full conduction (\(\beta = 180°\)); voltage is uncontrolled.
Partial conduction (\(\beta < 180°\)); voltage is reduced.
Normalised rms stator voltage:
(all angles in radians; \(\beta\) is the conduction angle per half-cycle)
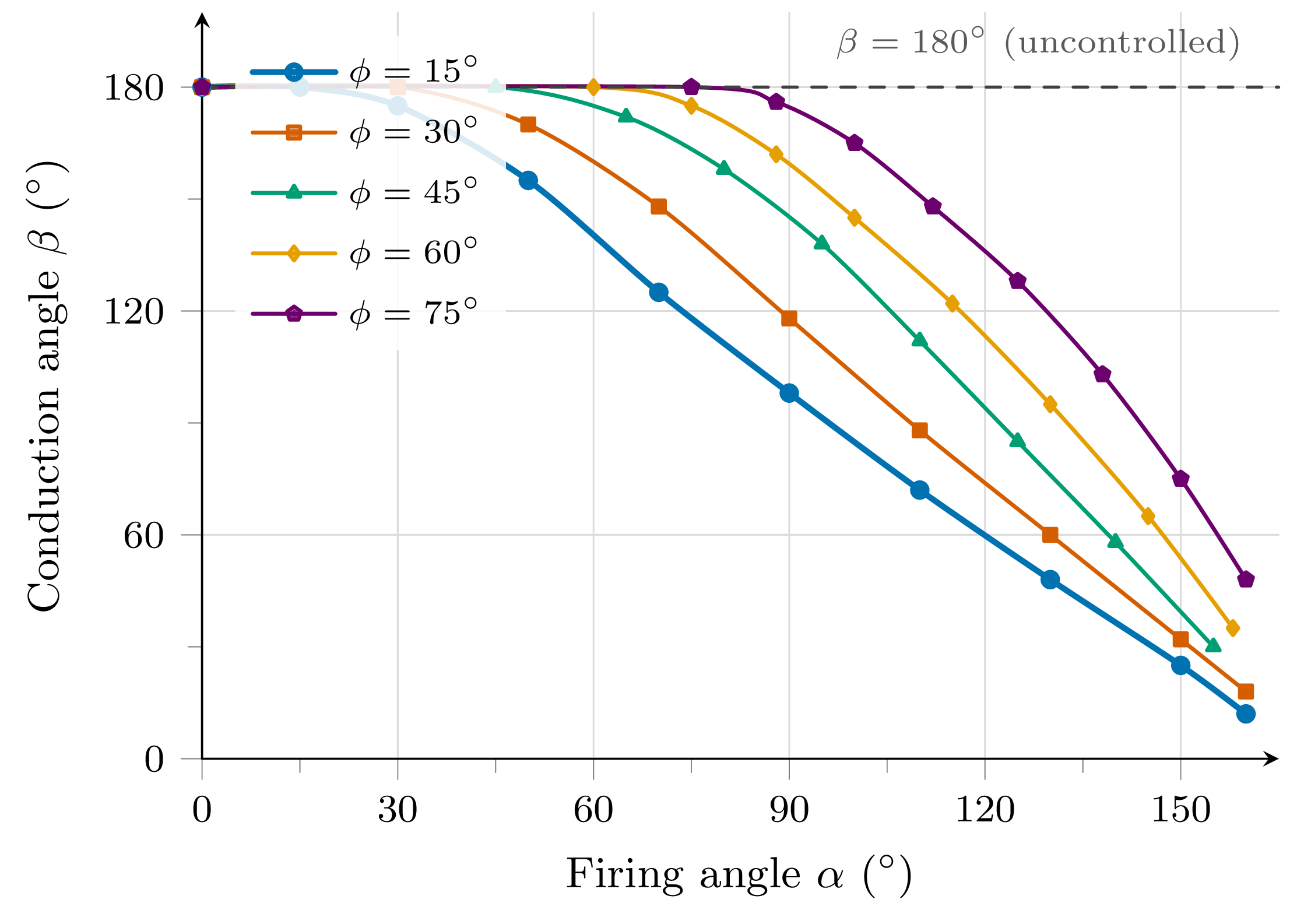
Key observations:
- Flat region (\(\beta = 180°\)): no control effect; motor sees full voltage. Control begins only for \(\alpha > \phi\).
- Decreasing region: increasing \(\alpha\) reduces \(\beta\), hence \(V_{1n}\) and electromagnetic torque.
- A more inductive motor (larger \(\phi\)) requires a higher \(\alpha\) before voltage reduction starts.
- As \(\alpha \to 180°\), \(\beta \to 0\): motor is effectively de-energised.
- For a given \(\alpha\), \(\beta\) also depends on slip (via \(\phi\)); curves must be recalculated at each operating point.
Model validity: Analytical model is valid for \(\alpha \lesssim 135°\). Beyond this, harmonic distortion is severe and a full \(d\)–\(q\) dynamic simulation is required.
Torque Stability Criterion
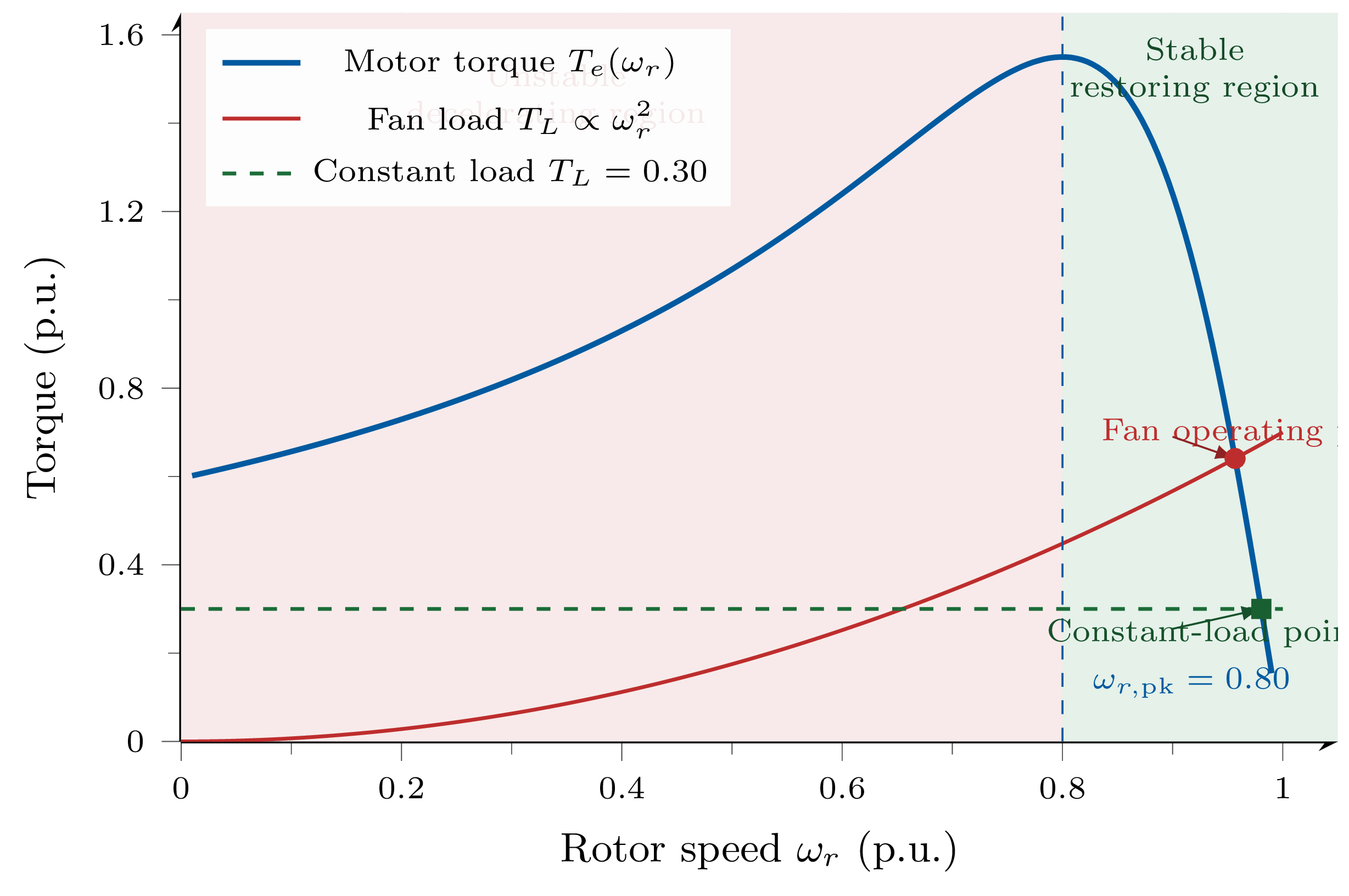
At the load–torque intersection, operation is stable if and only if:
- Right of peak torque (\(s < s_\text{pk}\), low slip): \(T_e\) falls as speed rises; the intersection with the load curve is on the stable side.
- Left of peak torque (\(s > s_\text{pk}\), high slip): \(T_e\) rises as speed rises; any upward perturbation leads to runaway — this region is open-loop unstable.
Implication for phase-controlled drives: Reducing \(V_s\) scales the entire \(T_e\)–\(\omega_r\) family downward by \(V_s^2\). If the load torque exceeds the new peak electromagnetic torque, the motor stalls. Closed-loop current limiting prevents this.
NEMA D advantage: High \(R_r\) moves peak torque toward standstill, enlarging the stable operating region.
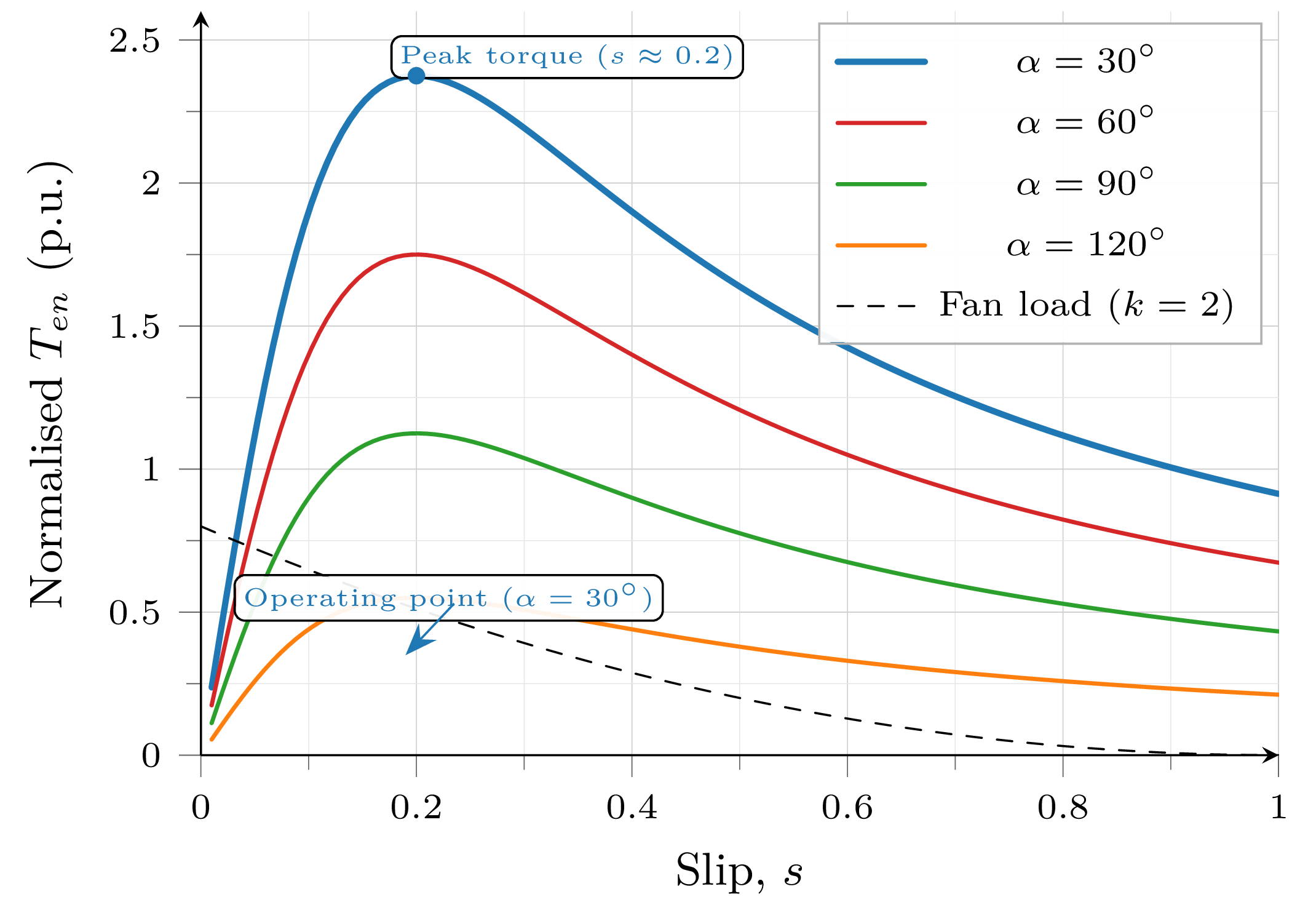
Normalised Torque–Speed Characteristics
where all quantities are in per unit on a consistent motor base.
Computation procedure:
- Choose slip \(s\) \(\Rightarrow\) compute \(Z_{eq},\,\phi\).
- Given \((\alpha,\phi)\) \(\Rightarrow\) solve for \(\beta\) (Newton–Raphson).
- Evaluate \(V_{1n}\) from the rms-voltage formula.
- Compute \(T_{en}\).
- Repeat for the full range of \(s\) and \(\alpha\).
Open-loop speed limitation: For a fan load (\(T_L \propto \omega_r^2\)) the open-loop speed variation spans only \(\approx 6\,\%\) of rated speed. Closed-loop control (Lecture 2) is essential for a useful speed range.
Summary and Preview
- Three IM speed-control strategies; phase control is slip-based with \(\eta \leq (1{-}s)\).
- Air-gap power partition: \(P_{ag}= P_{r,cu}+ P_{\text{mech}}\); rotor copper loss \(= s\,P_{ag}\).
- SCR waveforms: non-sinusoidal for \(\alpha>\phi\); harmonics increase with \(\alpha\).
- Firing angle \(\alpha\) reduces rms stator voltage; control only for \(\alpha > \phi\).
- Reversible drive: anti-parallel switch groups with dead-time blanking give Quadrants I and III operation.
- Stability criterion: \(dT_e/d\omega_r < dT_L/d\omega_r\) at the operating point.
- Conduction angle \(\beta\): transcendental equation; solved by Newton–Raphson.
- Normalised torque–speed family via the 5-step procedure.
- Load interaction: rotor and stator current profiles vs. speed for \(k = 0, 1, 2\) loads
- Thermal constraints: peak current location and safe operating band
- Input power factor and reactive power consumption of the phase-controlled drive
- Closed-loop cascade controller: inner current loop + outer speed PI
- Efficiency: phase control vs. external resistance
- Applications and motivation for slip-energy recovery