Summary of Lectures 5A–5C
- Construction, rotating magnetic field, slip s, operating modes
- Per-phase equivalent circuit; Rr′/s power split
- Pag:Pr,Cu:Pconv = 1:s:(1−s)
- Tem = Pag/ωs
- Torque-slip equation via Thévenin equivalent
- Tmax is independent of Rr′; smax ∝ Rr′
- NEMA design classes A, B, C, D
- DC Resistance / No-load / Locked-rotor tests
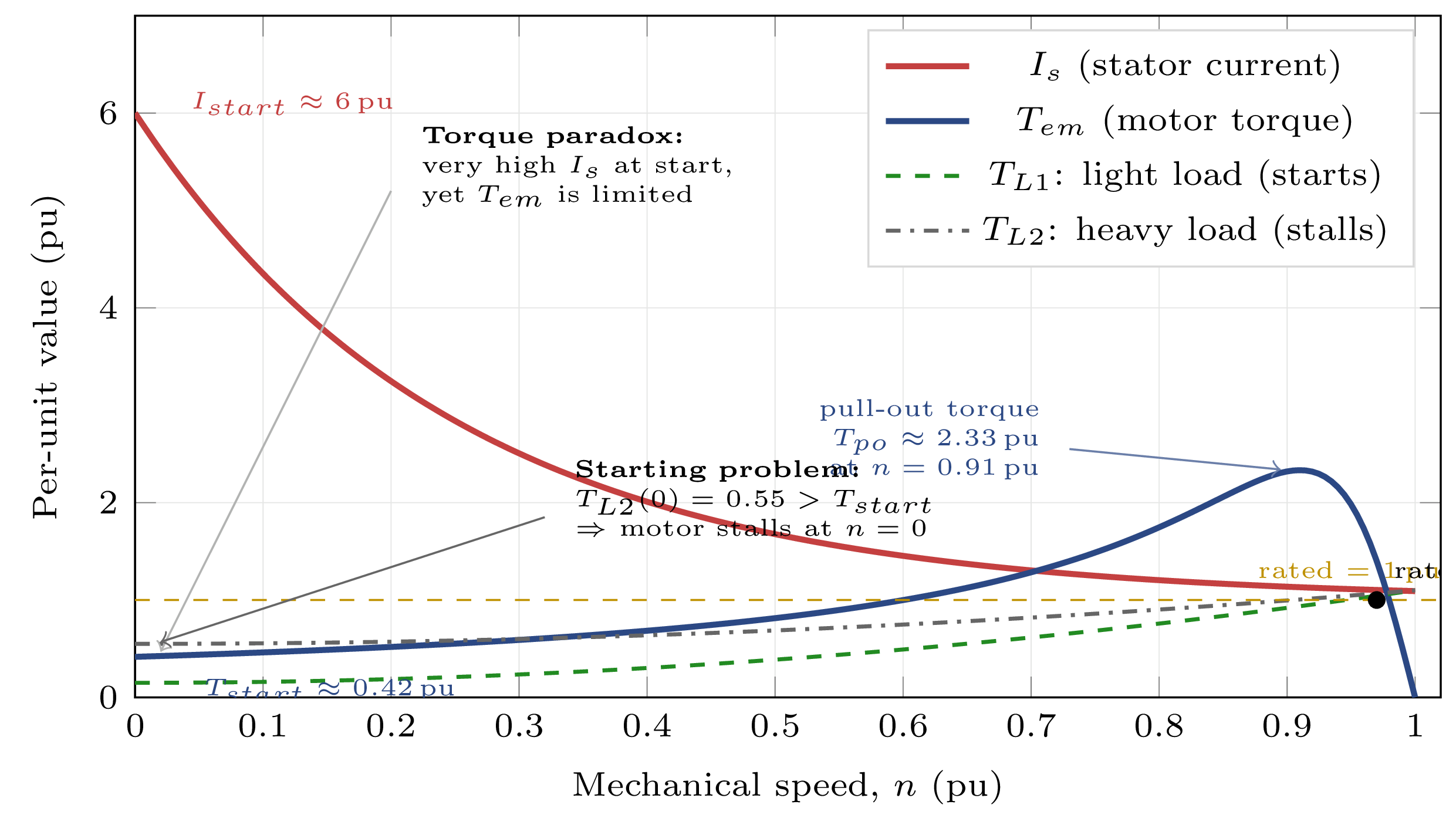
Tstart ≈ (0.5–1.5) Trated
High inrush current with only moderate torque — both issues require engineering solutions.
The Starting Problem — Root Cause
- Supply voltage dip: ΔV ∝ Zsource · Istart
- Can cause a 10–20% dip for large motors
- Trips sensitive equipment on the same feeder
- Thermal stress: I²t constraint on stator windings
Reducing voltage to limit current hurts torque even more, because Tem ∝ Vs²:
| Voltage Reduction | Torque Reduction |
|---|---|
| 10% | 19% |
| 33% (Y-Δ method) | 56% |
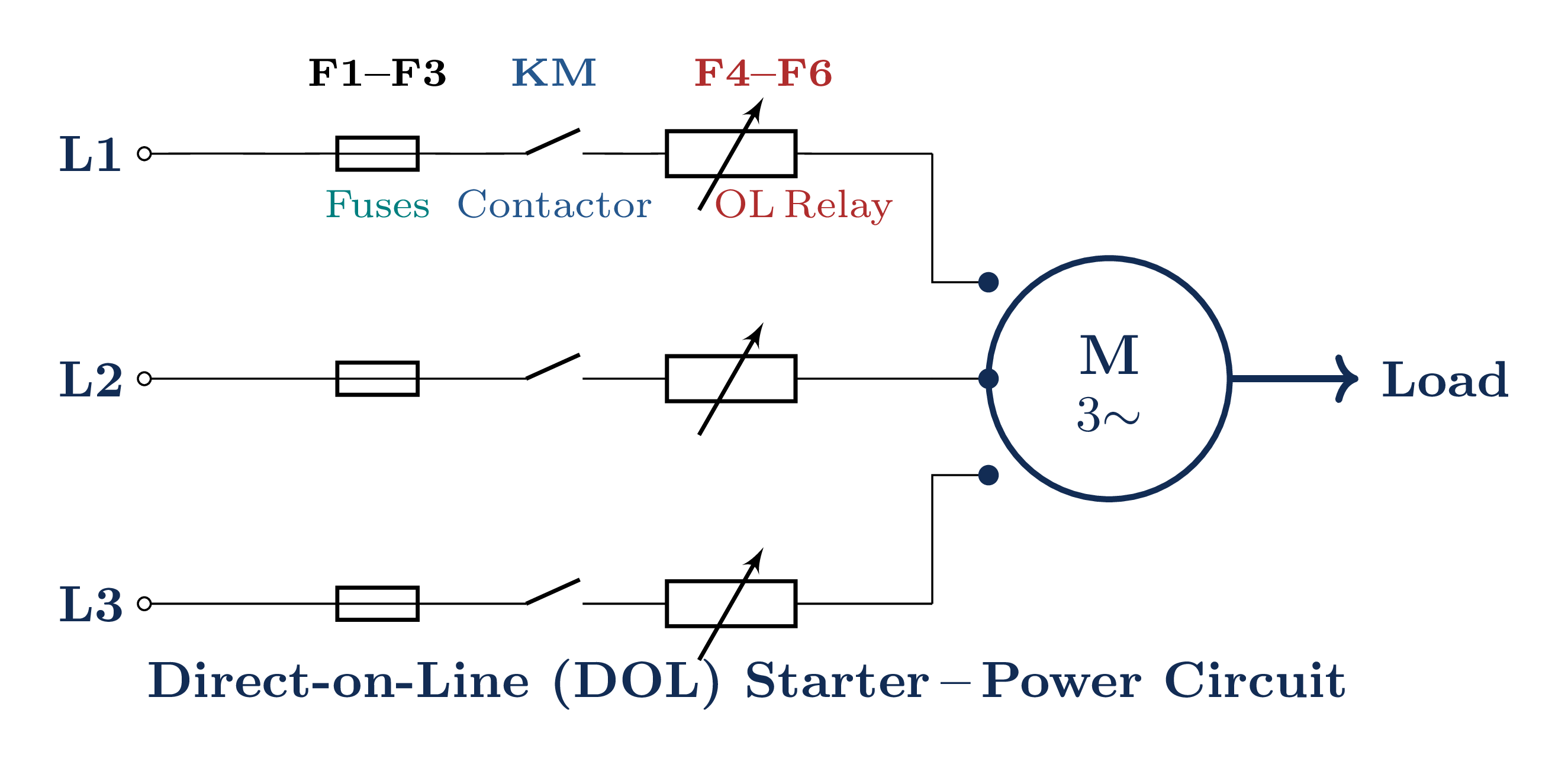
Method 1 — Direct-On-Line (DOL) Starting
| Starting current | 5–7× Irated |
| Starting torque | 100% of DOL |
| Cost | Lowest |
| Complexity | Minimal |
- Maximum available starting torque
- Fastest motor acceleration
- Simple: one contactor + overload relay only
- Reliable, low maintenance
- Severe voltage dip on supply bus
- Mechanical shock to couplings & gearboxes
- High I²t thermal stress on windings
- Unsuitable for weak supply grids
- P < 10 HP — generally acceptable
- 10 < P < 50 HP — case-by-case basis
- P > 50 HP — usually not permitted
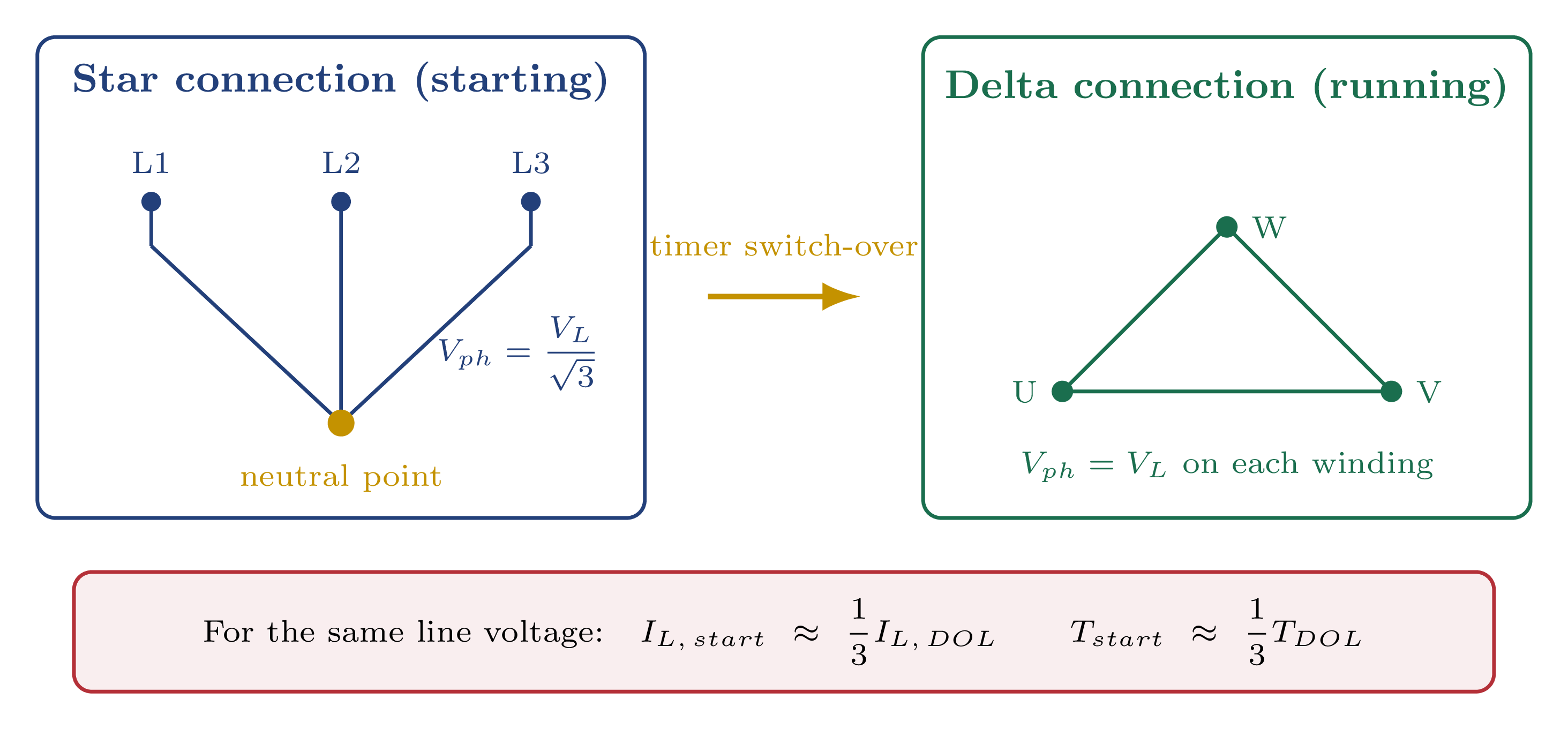
Method 2 — Star-Delta (Y-Δ) Starting
Motor designed for Δ at rated voltage is first connected in Y (phase voltage reduced by 1/√3), then switched to Δ at approximately 70–80% speed.
Phase voltage in Δ: VΔ = VL
Phase current in Y: IY,ph = (VL/√3) / Zph
Phase current in Δ: IΔ,ph = VL / Zph
IY,line = (1/3) · IΔ,line
TY,start = (1/3) · TΔ,start
- Line current reduced to exactly 1/3 of DOL inrush
- Starting torque reduced to exactly 1/3 of DOL torque
- Low cost: three contactors, one timer
- No additional power components
- Requires motor with 6 accessible terminals
- Motor must be designed for Δ at rated line voltage
- Y→Δ transition produces a second current transient
- Torque reduction (1/3) may be too severe for high-inertia loads
Method 3 — Autotransformer Starting
A three-phase autotransformer steps the supply down to a selected tap during starting. Common taps: 50%, 65%, 80% of VL. For tap ratio k (0 < k < 1):
Iline = k² · IDOL
Tstart = k² · TDOL
| Tap k | Motor Voltage | Iline/IDOL | T/TDOL |
|---|---|---|---|
| 0.50 | 0.50 VL | 0.25 | 0.25 |
| 0.65 | 0.65 VL | 0.42 | 0.42 |
| 0.80 | 0.80 VL | 0.64 | 0.64 |
- Multiple selectable taps — flexible for any load type
- Works with Y- or Δ-connected motors (no 6-terminal requirement)
- Better torque-per-supply-ampere ratio than Y-Δ
- Suitable for high-inertia or heavily-loaded starts
- Transformer is bulky and relatively expensive
- Transition transient still present at bypass
- Typically chosen for P > 50 HP applications
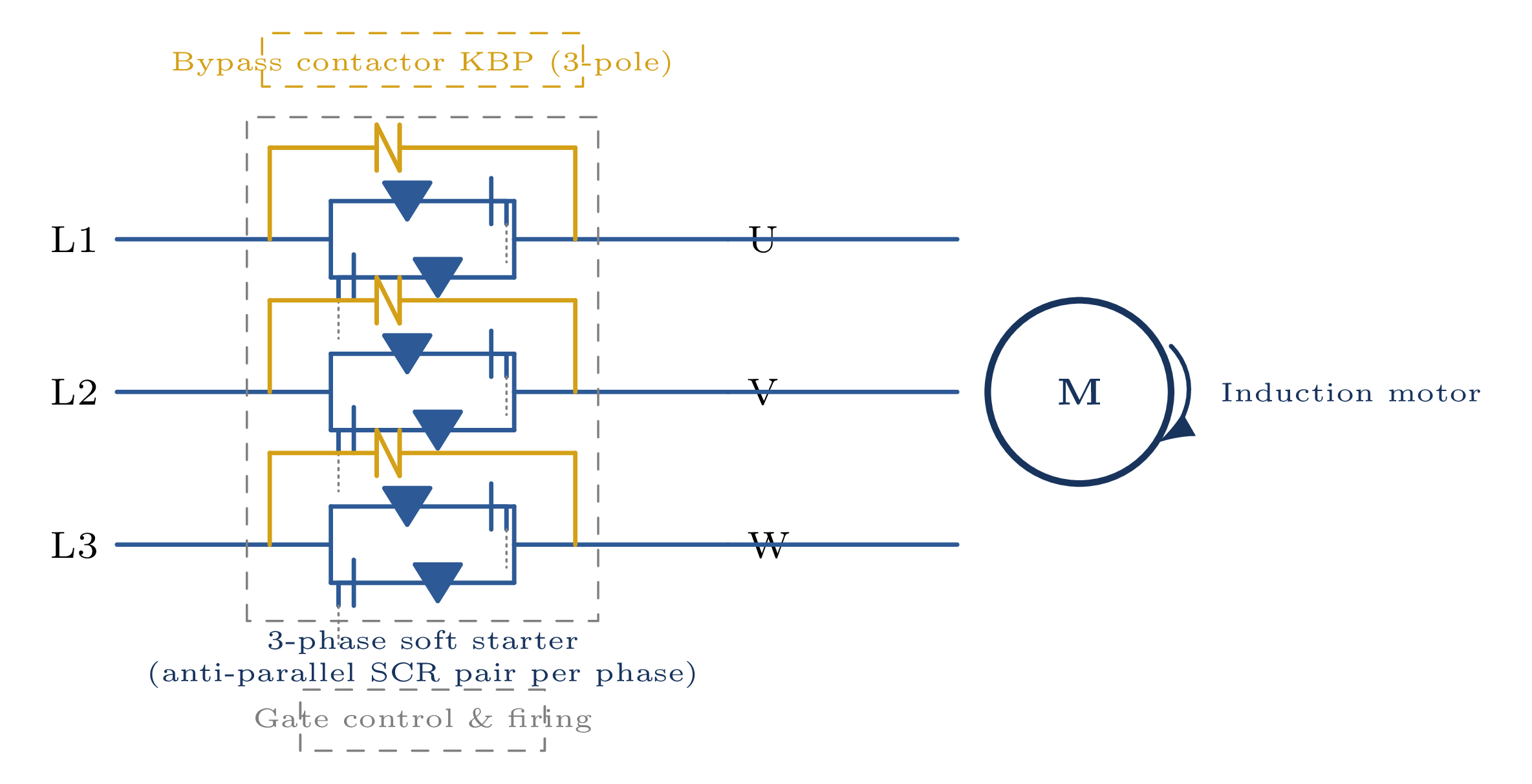
Method 4 — Soft Starters
Back-to-back SCR pairs in each phase control the firing angle α, progressively raising the RMS voltage from a low initial value to full line voltage over a programmable ramp time.
- Voltage ramp — V rises linearly with time (simplest)
- Current limit — Is held constant during ramp (most common)
- Torque control — V adjusted to match load profile
- Kick-start — brief voltage pulse for high breakaway torque loads
- Smooth, jerk-free start — no transition transient
- Soft stop (controlled deceleration) also available
- Built-in protection: overload, phase loss, stall detection
- Starting current only 2–4× Irated (vs. 5–7× for DOL)
Soft starters control voltage only — once running, the bypass contactor locks in full voltage. For continuous speed control, a VFD is required.
Method 5 — Rotor Resistance Starting (Wound-Rotor)
External resistance inserted in the rotor circuit via slip rings and brushes. By choosing Rext so that smax = 1, we achieve Tstart = Tmax — maximum starting torque at near-rated current.
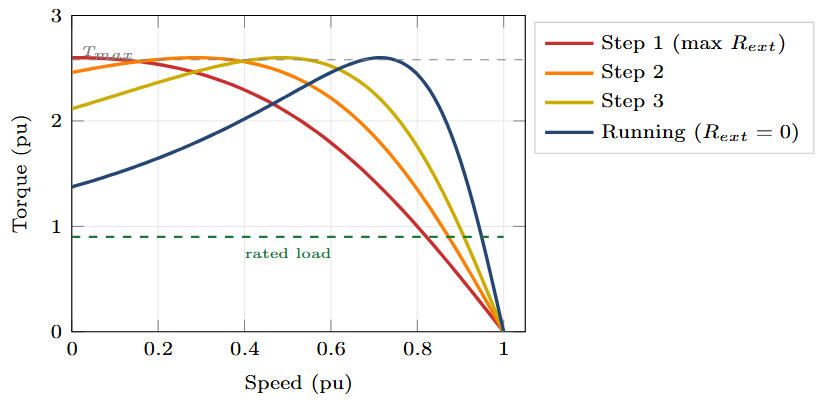
- Starting: Excellent torque & controlled current
- Running: Power wasted as heat in Rext; Ploss = s · Pag
- Largely superseded by VFDs in modern installations
Starting Methods — Complete Comparison
| Method | Istart/Irated | Tstart/TDOL | Cost | Transient | Best For |
|---|---|---|---|---|---|
| DOL | 5–7× | 100% | Lowest | None | Small motors <10 HP |
| Star-Delta | 1.7–2.3× | 33% | Low | Surge at switchover | Light loads; 10–100 HP |
| Autotransformer (65%) | 2.1–2.8× | 42% | Medium | Surge at bypass | Heavy loads >50 HP |
| Soft Starter | 2–4× | Variable | Med-High | None | Smooth start; all sizes |
| Rotor Rext | ≈1–1.5× | Up to Tmax | Medium | Stepped | Wound-rotor; high inertia |
| VFD | <1.5× | >150% | Highest | None | Variable speed; all sizes |
- Fixed speed, light load → Star-Delta
- Fixed speed, heavy/high-inertia load → Autotransformer
- Smooth start/stop required → Soft starter
- Variable speed required → VFD (also handles starting)
VFD costs have dropped dramatically. For new installations, a VFD is increasingly chosen even when constant-speed operation is the goal — it provides starting, protection, soft-stop, and energy savings in a single device.
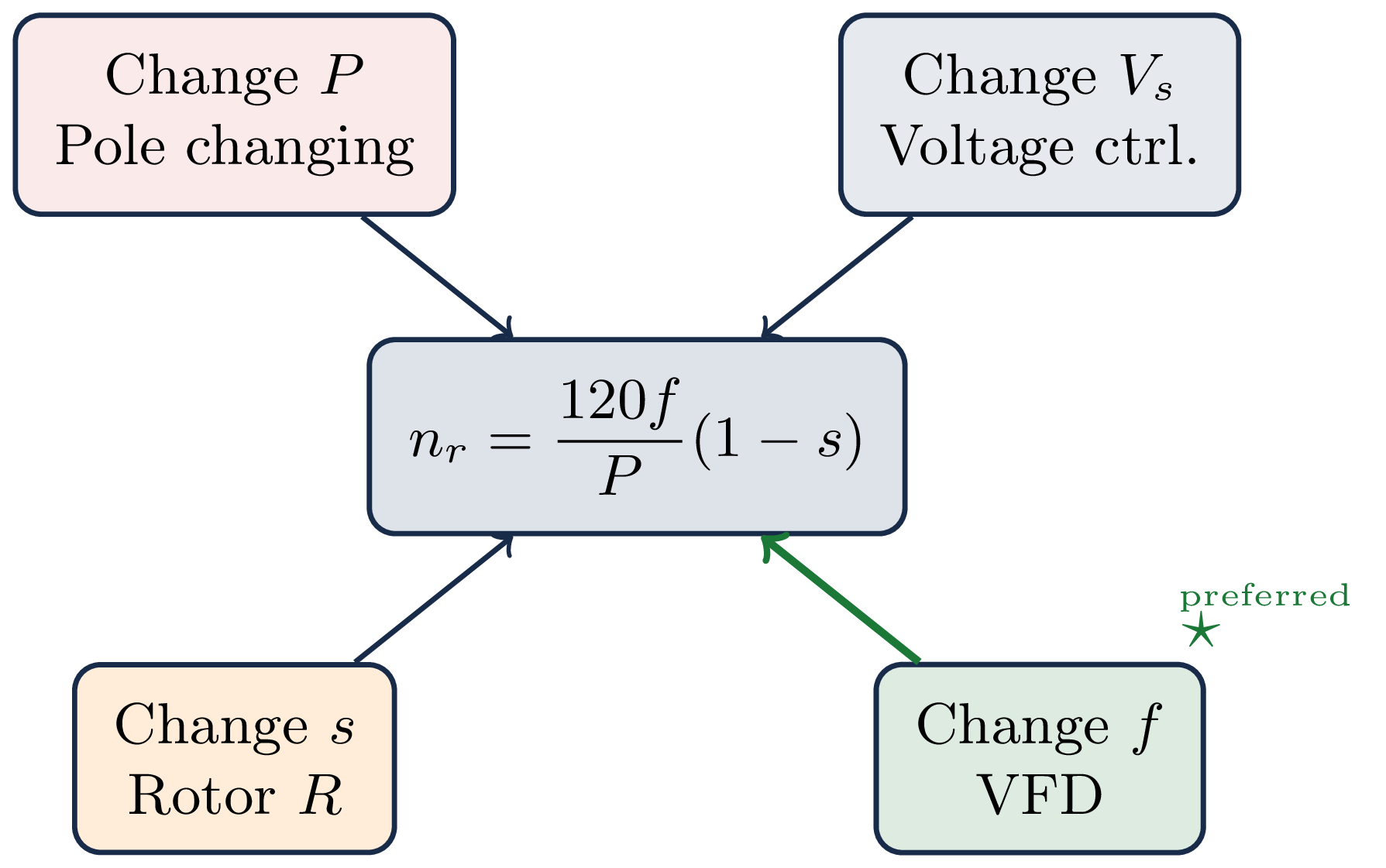
Speed Control — The Fundamental Equation
| Change | Method | Quality |
|---|---|---|
| Poles P | Pole changing | Steps only |
| Voltage Vs | Thyristor control | Limited range; poor efficiency |
| Slip s | Rotor resistance | Wide range; very poor efficiency |
| Frequency f | VFD (V/f control) | Excellent |
All methods except frequency control waste power in external resistors or operate at high slip where Pr,Cu = s·Pag is large. With VFD, s ≈ 3–5% at all operating speeds, giving consistently high efficiency.
Method 1 — Pole Changing
A specially wound stator is reconnected to change the number of poles, shifting the synchronous speed in discrete steps using consequent-pole winding.
| Pole Configuration P1/P2 | Speed 1 (rpm) | Speed 2 (rpm) |
|---|---|---|
| 4 / 8 | 1500 | 750 |
| 4 / 6 | 1500 | 1000 |
| 6 / 8 | 1000 | 750 |
- 2–3 fixed speeds are sufficient (e.g. multi-speed fans, escalators)
- Simple control — no power electronics
- Examples: cooling tower fans, machine-tool spindles
- Only discrete speed steps — no continuous variation
- Special motor required (2 speeds: 1 winding; 3 speeds: 2 windings)
- Motor is physically larger than a single-speed equivalent
Method 2 — Voltage Control
Thyristor AC voltage controllers reduce Vs. Since Tem ∝ Vs², the torque-speed curve shifts downward — the motor settles at higher slip to match the load torque, resulting in lower speed.
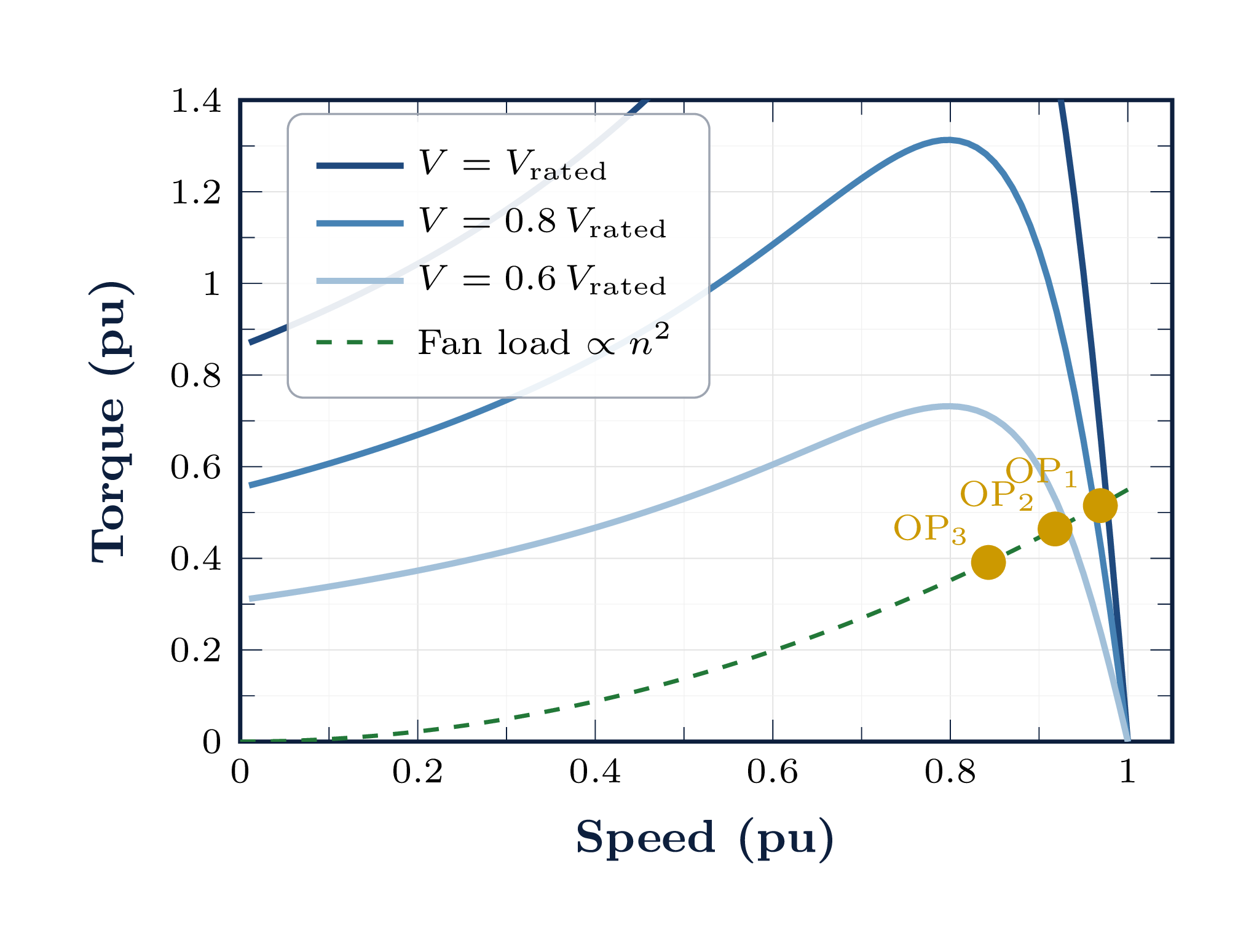
The operating point slides deep into the high-slip region. At 50% speed: s ≈ 0.5 and Pr,Cu = s·Pag = 0.5·Pag. Half of all converted power is wasted as rotor heat. The rotor overheats and efficiency collapses.
Useful range for fan/pump loads (TL ∝ n²): approximately 70–100% of rated speed only.
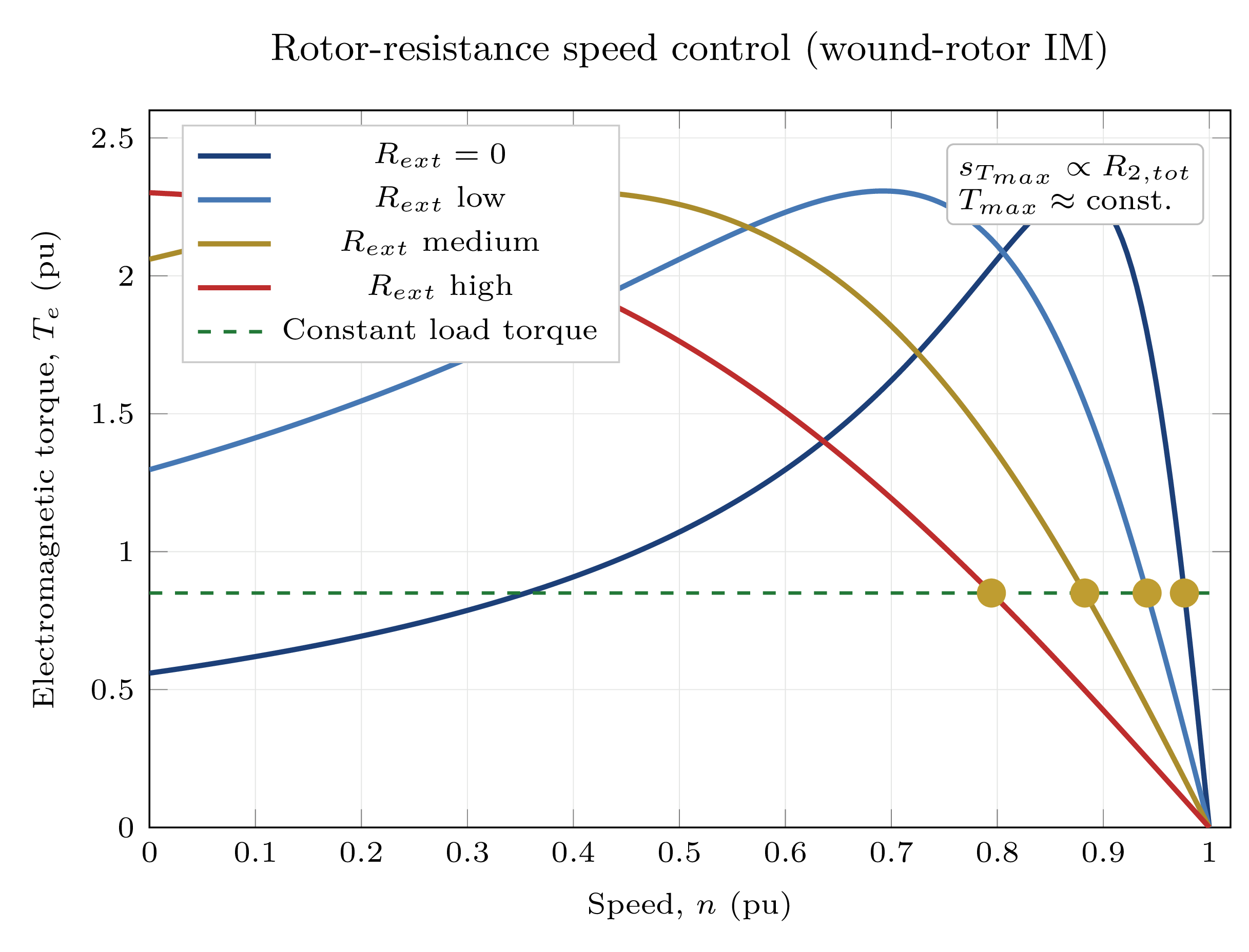
Method 3 — Rotor Resistance Speed Control
Mechanical efficiency: ηmech ≈ 1 − s
At 50% speed (s = 0.5): only 50% of air-gap power reaches the shaft. Ploss,ext = 3·Rext·Ir′². The severe efficiency penalty at reduced speeds makes this approach economically unacceptable for new installations.
Variable Frequency Drive — Architecture & Power Stages
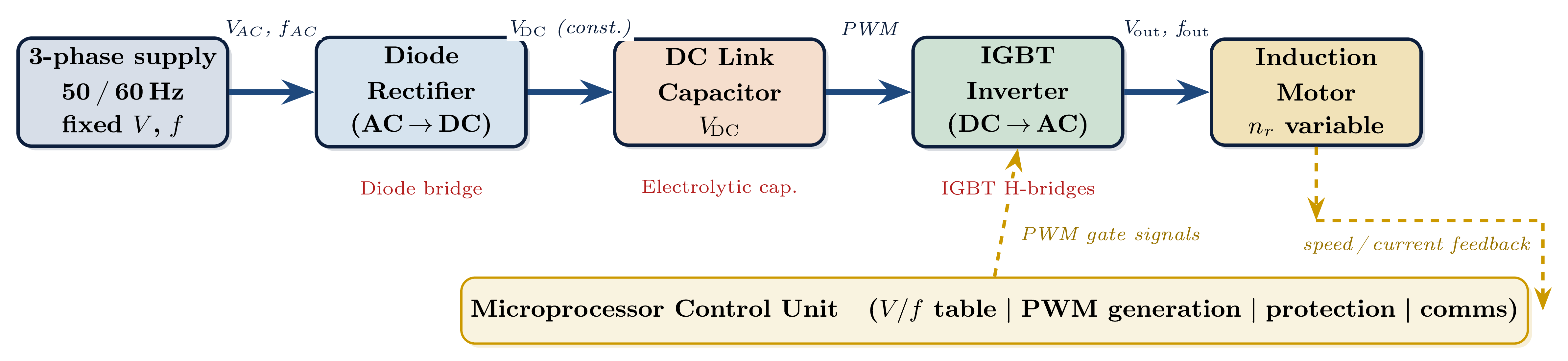
Fig. 2 — Three-stage VFD: diode rectifier (AC→DC), DC link capacitor bank, IGBT PWM inverter (DC→variable AC).
IGBTs switch at 4–16 kHz. The motor's inductance filters the pulses to produce approximately sinusoidal fundamental currents at the desired output frequency fout.
VFD ramps from f ≈ 0 Hz. Slip stays small; current remains near rated value throughout. No inrush current and no voltage dip on the supply.
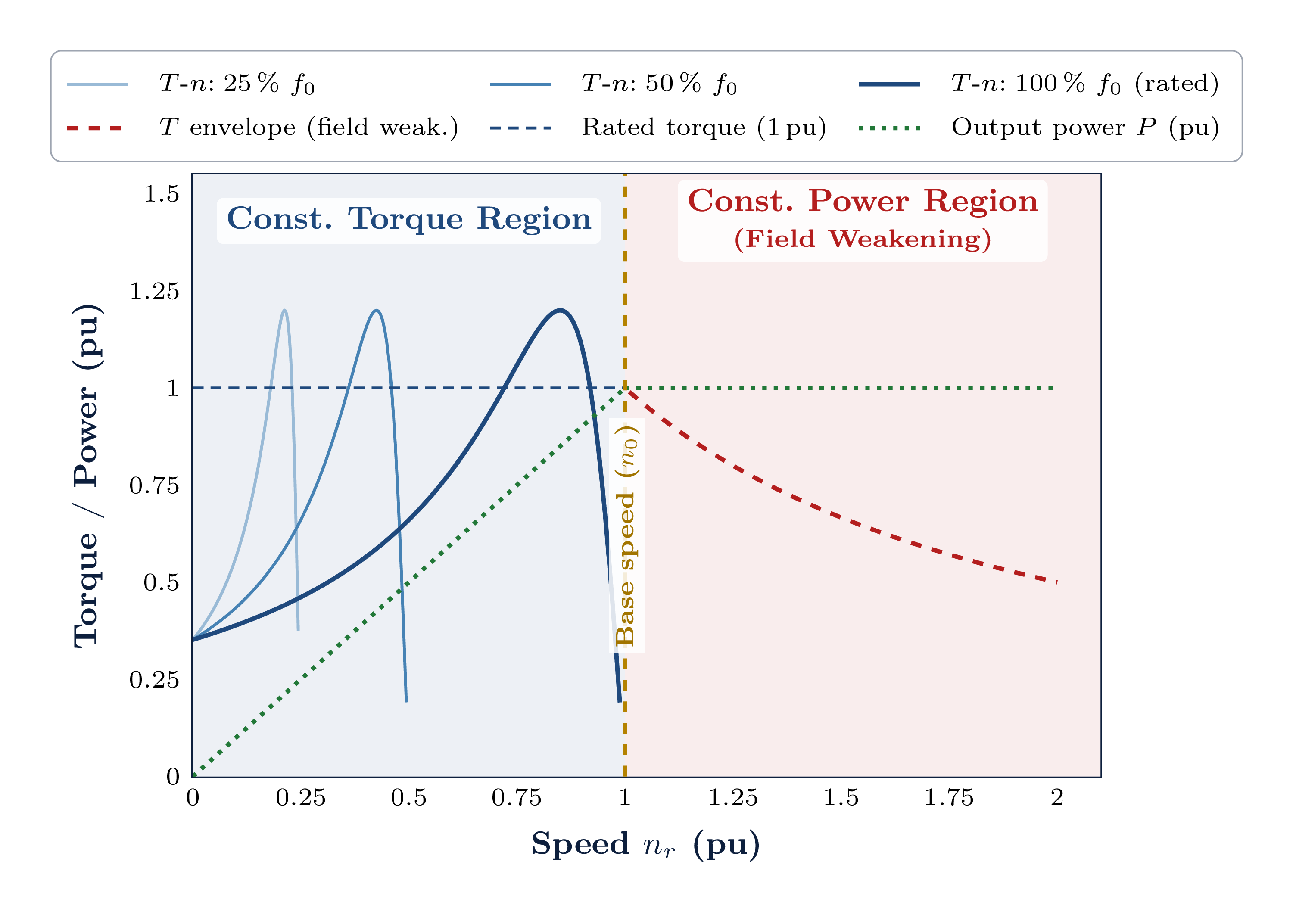
V/f Control — Constant Flux Principle
The stator voltage equation (neglecting Rs drop at normal speed):
∴ Φmax = Vs / (4.44·f·Ns) ∝ V/f
If V/f = const ⟹ Φmax = const
Constant flux ⟹ constant torque capability at every speed
- V/f = const ⇒ Φ = const
- Tmax approximately constant
- Small slip ⇒ high efficiency
- Constant-torque region
- Voltage saturates at Vmax
- Flux decreases as f rises
- Tmax ∝ 1/f — torque capability falls
- Output power remains approximately constant
- Field-weakening region
At low f, stator resistance drop IsRs is not negligible. A boost is added:
Vmin ≈ 15–25% of Vrated
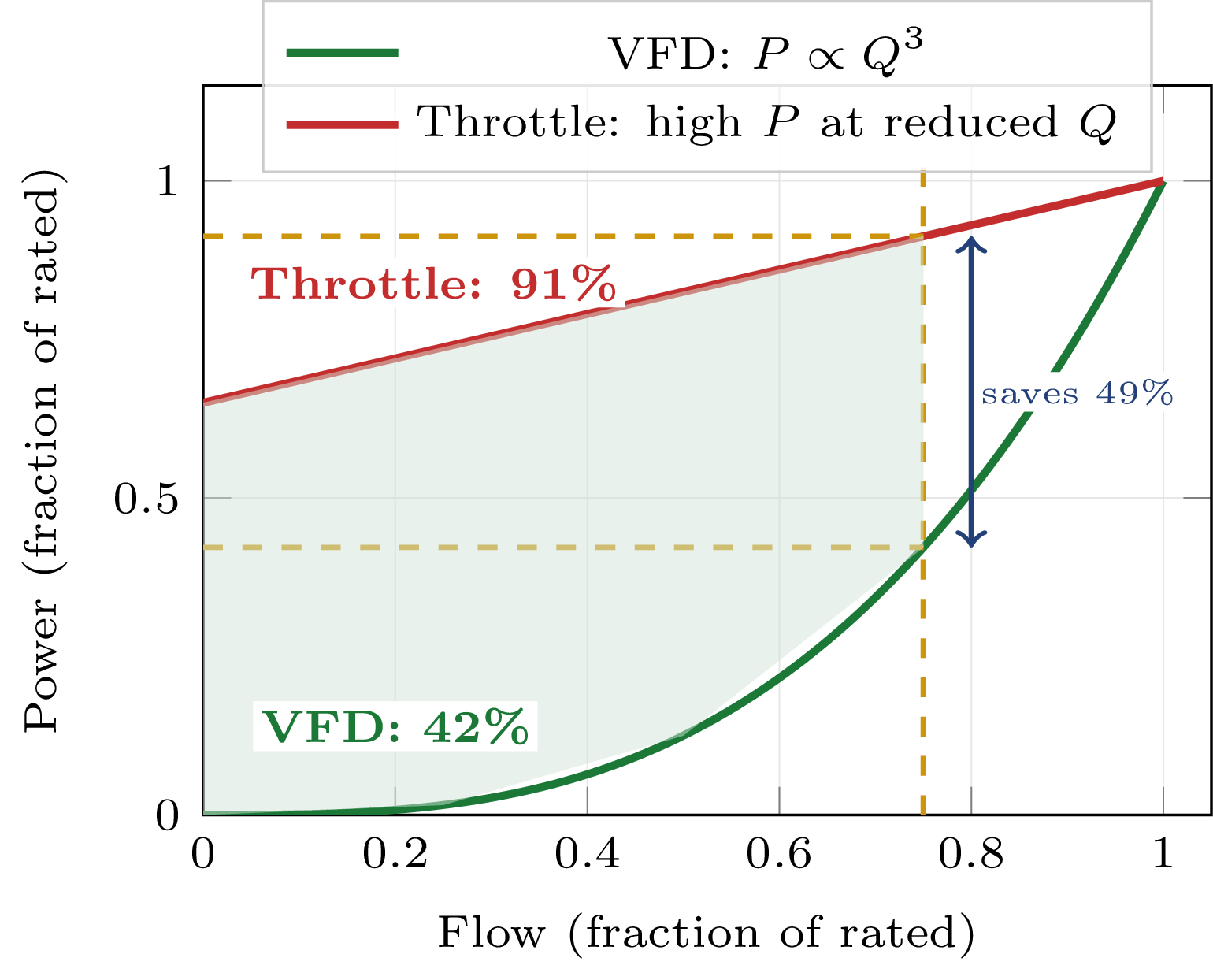
Affinity Laws & VFD Energy Savings
H2/H1 = (n2/n1)² (Head ∝ speed²)
P2/P1 = (n2/n1)³ (Power ∝ speed³)
0.75³ = 0.422. This cube relationship makes even modest speed reductions yield enormous energy savings — and explains why VFDs are among the most cost-effective investments in industrial energy management.
Motor runs at full speed; valve dissipates excess energy. Power ≈ 75–100% of rated. All energy above the process requirement is wasted as pressure drop across the valve.
Motor runs at 75% speed. Power ≈ 42% of rated. No throttling loss. Energy saving ≈ 33–58%. Payback period typically 1–3 years.
Lecture Summary
| Method | Ist/Ir | Tst/TDOL |
|---|---|---|
| DOL | 5–7× | 100% |
| Y-Δ | 1.7–2.3× | 33% |
| Autotransformer | 2–3× | Selectable |
| Soft starter | 2–4× | Variable |
| VFD | <1.5× | >150% |
| Method | Range | Efficiency |
|---|---|---|
| Pole changing | Discrete steps | Good |
| Voltage control | 70–100% | Poor |
| Rotor resistance | 0–100% | Very poor |
| VFD (V/f) | 0–>100% | Excellent |
- Vs/f = const ⇒ Φ = const ⇒ Constant torque capability
- Below base speed: constant-torque region
- Above base speed: field-weakening (constant power)
- Slip small at all speeds ⇒ high efficiency everywhere
P ∝ n³ ⇒ P₂/P₁ = (n₂/n₁)³
- Reducing speed to 75% → power drops to 42%
- Energy savings of 30–60% for fans/pumps
- VFD payback: typically 1–3 years
The Variable Frequency Drive (VFD) is the universal solution for induction motor drives. It solves the starting problem, enables continuous speed control with high efficiency, maintains small slip at all operating points, leverages the cube law for centrifugal loads, and typically pays back its cost in energy savings within 1–3 years. For new industrial installations, the VFD is the first choice — not the last resort.