Key Results from Lecture 5A
- Rotating field at synchronous speed: \(n_s = \dfrac{120f}{P}\) rpm
- Slip: \(s = \dfrac{n_s - n_r}{n_s}\), rotor frequency \(f_r = s \cdot f\)
- Rotor speed: \(\omega_r = \omega_s(1-s)\)
- Rotor must slip to sustain torque
- Typical rated slip: 0.5%–8%
- Transformer analogy & turns-ratio referral
- Per-phase equivalent circuit (full & simplified)
- Physical meaning of every circuit element
- The critical \(R_r'/s\) power split
- Complete power flow analysis & torque expression
- Efficiency & power factor vs. load
Why Do We Need an Equivalent Circuit?
- Predict torque, current, PF, efficiency at any operating point — no prototype needed
- Provide the mathematical basis for drive control design
- Enable parameter extraction from standard motor tests (Lecture 5C)
| Quantity | From Circuit |
|---|---|
| Stator current \(I_s\) | KVL |
| Rotor current \(I_r'\) | KVL |
| Input power \(P_{in}\) | \(3V_s I_s \cos\phi\) |
| Air-gap power \(P_{ag}\) | \(3I_r'^{\,2} R_r'/s\) |
| Torque \(T_{em}\) | \(P_{ag}/\omega_s\) |
| Efficiency \(\eta\) | \(P_{out}/P_{in}\) |
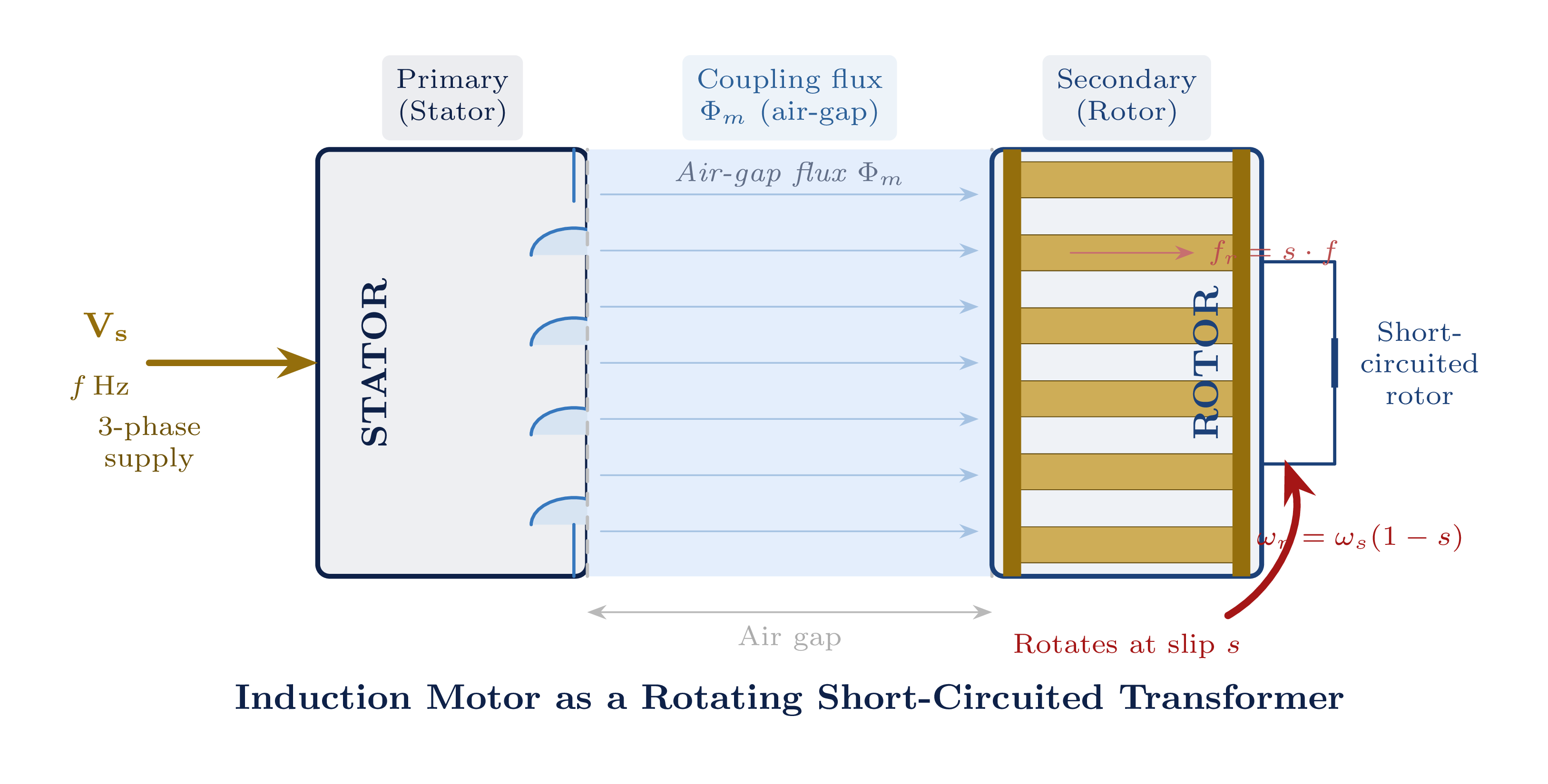
The Transformer Analogy
| Transformer | Induction Motor |
|---|---|
| Primary winding | Stator winding |
| Secondary winding | Rotor winding |
| Magnetic core | Air-gap flux path |
| Open/loaded secondary | Short-circuited rotor |
| Fixed secondary | Rotating secondary |
| Fixed frequency | Slip frequency \(f_r = sf\) |
This feature — the slip-dependent impedance \(R_r'/s\) — separates induction motor analysis from ordinary transformer analysis and is the key to understanding all operating characteristics.
Turns-Ratio Referral — Rotor to Stator
Stator and rotor have different numbers of turns. To place them in one circuit, rotor quantities are scaled to the stator side using the effective turns ratio:
Slip-Dependent Rotor Impedance
At rotor frequency \(f_r = sf\), the per-phase rotor voltage equation is:
Dividing by \(s\):
\[E_{ag} = I_r\!\left(\frac{R_r}{s} + jX_r\right)\]After referral:
\[\boxed{E_{ag} = I_r'\!\left(\frac{R_r'}{s} + jX_r'\right)}\]| Slip \(s\) | \(R_r'/s\) | Behaviour |
|---|---|---|
| \(s = 1\) (standstill) | \(R_r'\) | High current |
| \(s = 0.05\) (rated) | \(20R_r'\) | Moderate current |
| \(s \to 0\) (synchronous) | \(\to \infty\) | No current, no torque |
Full Per-Phase Equivalent Circuit
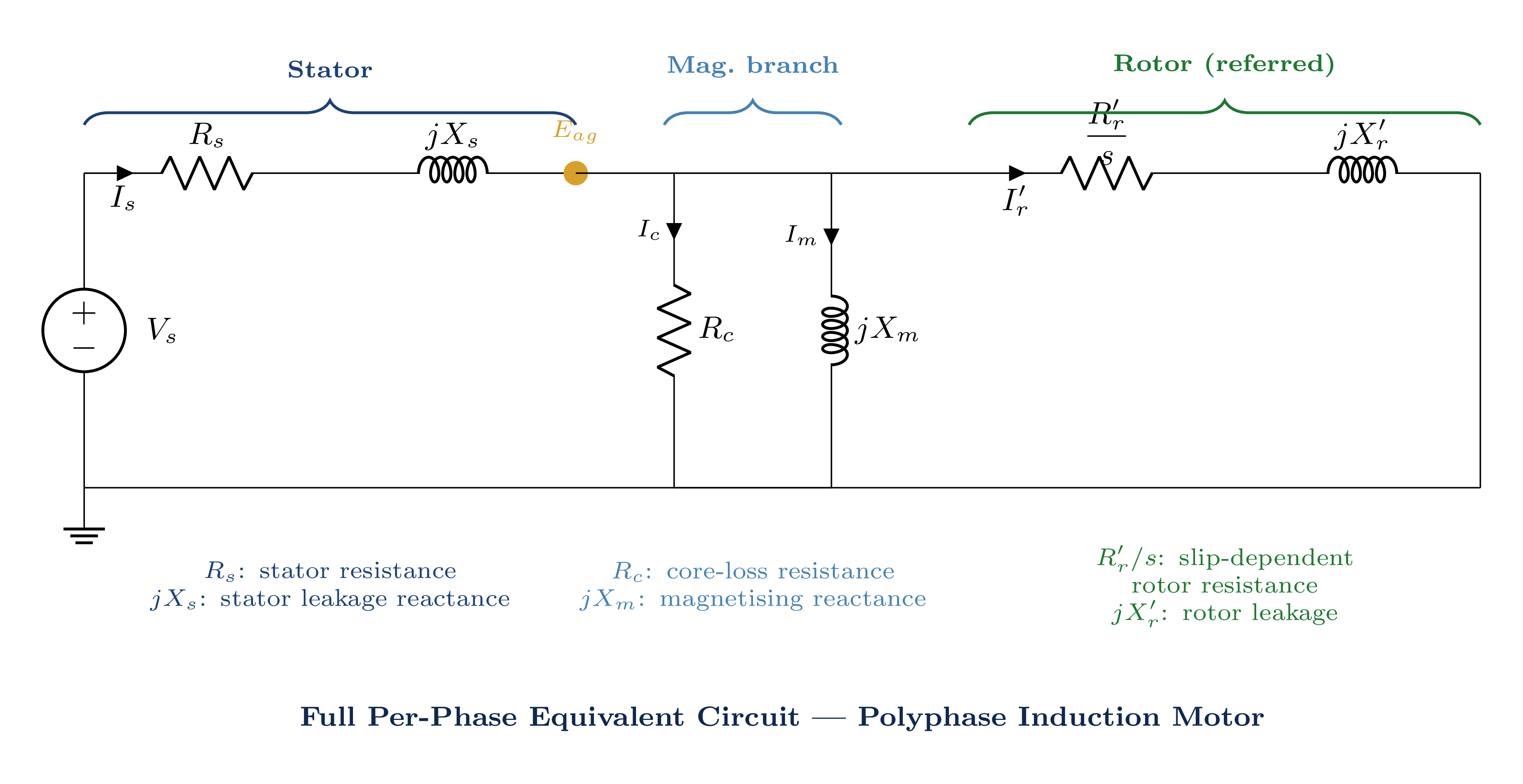
Fig. 1 — Full per-phase equivalent circuit: stator (\(R_s\), \(jX_s\)), magnetising branch (\(R_c \parallel jX_m\)), rotor (\(R_r'/s\), \(jX_r'\)).
Physical Meaning of Circuit Elements
| Region | Symbol | Name | Physical Meaning |
|---|---|---|---|
| Stator | \(R_s\) | Stator resistance | Copper losses in stator windings: \(P_{s,Cu} = 3I_s^2 R_s\) |
| Stator | \(jX_s\) | Stator leakage reactance | Flux linking only the stator; \(X_s = \omega_e L_{ls}\) |
| Magnetising | \(R_c\) | Core-loss resistance | Iron losses (hysteresis + eddy current); \(P_{core} = 3E_{ag}^2/R_c\) |
| Magnetising | \(jX_m\) | Magnetising reactance | Main mutual flux; \(I_m \approx 25\text{–}40\%\, I_{rated}\) |
| Rotor | \(R_r'/s\) | Referred rotor resistance | Key element — contains both rotor Cu loss and mechanical output power |
| Rotor | \(jX_r'\) | Referred rotor leakage | Flux linking only rotor; \(X_r' = \omega_e L_{lr}'\); evaluated at stator frequency |
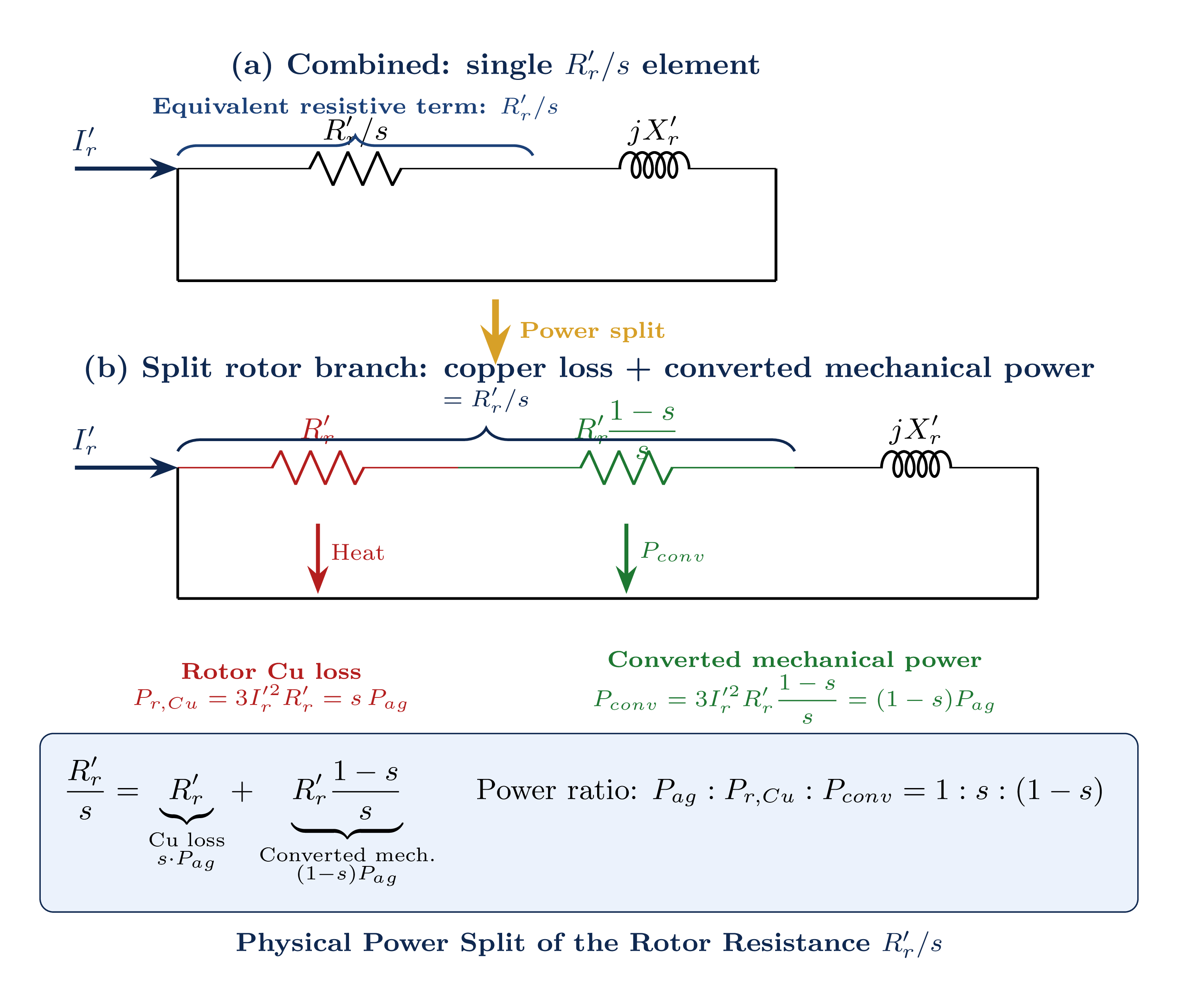
The Critical Power Split of \(R_r'/s\)
Heat dissipated in rotor bars. This is an actual physical resistor and represents true copper loss.
Circuit representation of shaft work. Not a physical component — it is the circuit proxy for mechanical work done on the load.
Simplified Per-Phase Equivalent Circuit
In most calculations \(R_c\) is very large and absorbs negligible current. The magnetising branch reduces to a single shunt element \(jX_m\).
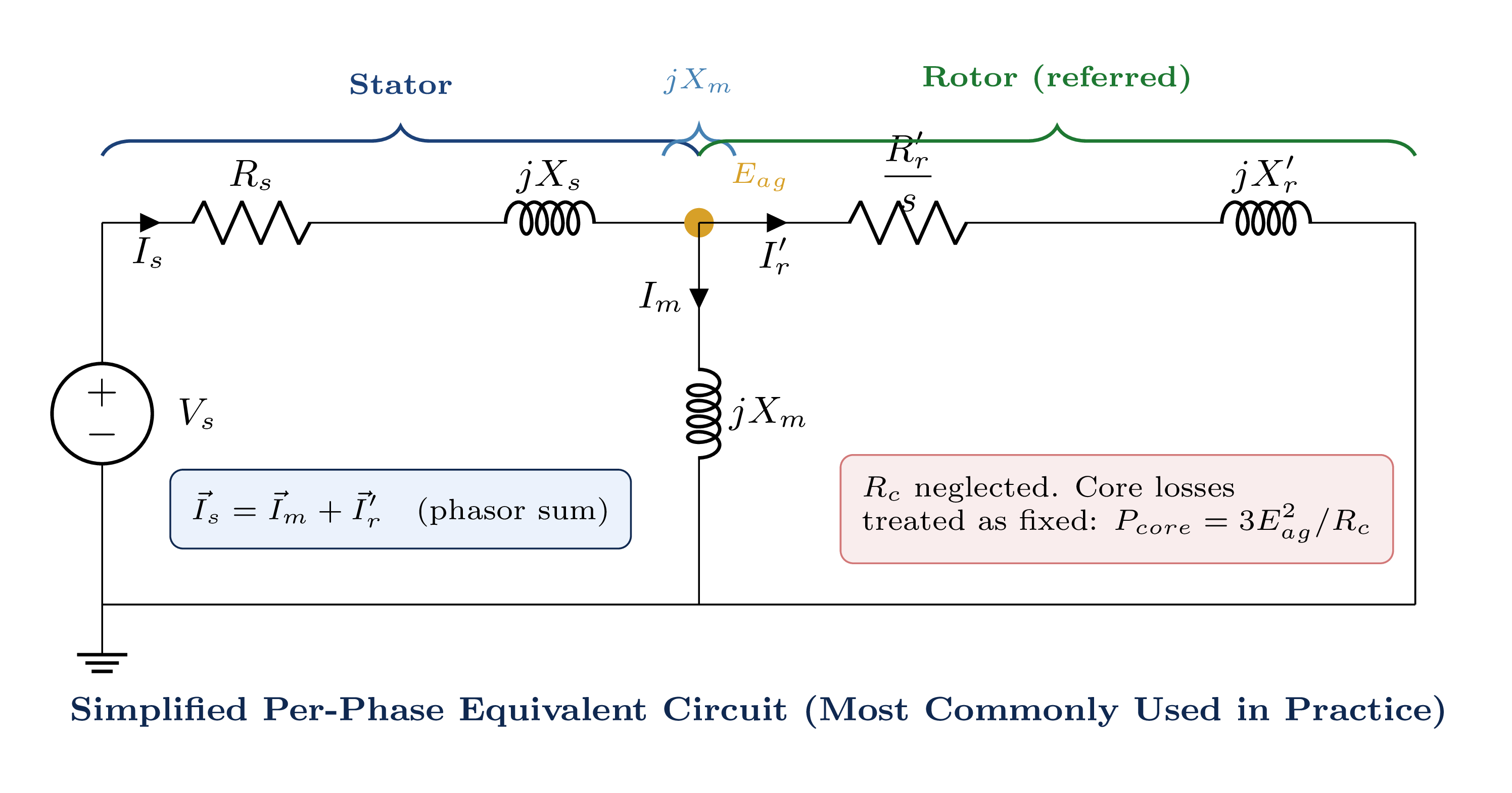
- \(I_m \approx 25\text{–}40\%\) of \(I_{rated}\)
- \(I_r' \approx 90\text{–}100\%\) of \(I_{rated}\) at full load
Phasor Diagram
- Take \(E_{ag}\) as the reference phasor
- \(I_m\) lags \(E_{ag}\) by \(90°\) (purely inductive \(jX_m\))
- \(I_r'\) lags \(E_{ag}\) by \(\theta_r = \arctan(sX_r'/R_r')\) — small at rated slip
- \(\vec{I}_s = \vec{I}_m + \vec{I}_r'\) (phasor sum)
- \(\vec{V}_s = \vec{E}_{ag} + \vec{I}_s(R_s + jX_s)\)
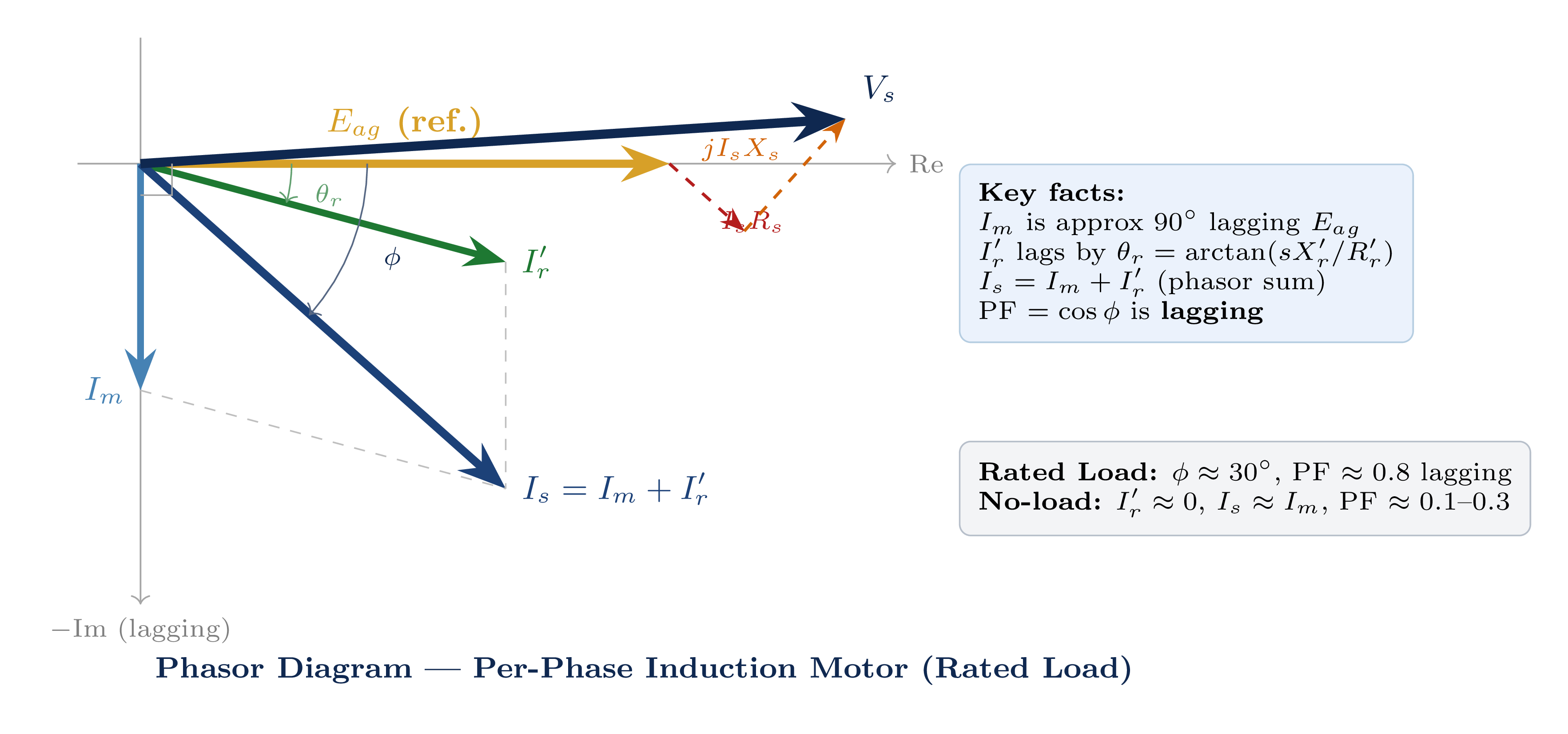
\(I_m\) is always \(90°\) lagging regardless of load. Even at full load, \(I_s\) carries a substantial reactive component — the "magnetising current penalty."
| Condition | PF Angle \(\phi\) | Power Factor | Notes |
|---|---|---|---|
| No-load | 80°–85° | 0.1–0.3 | \(I_s \approx I_m\); purely reactive |
| Rated load | 25°–40° | 0.75–0.90 | \(I_r'\) significant; \(I_m\) still present |
Power Flow Analysis — The Complete Chain
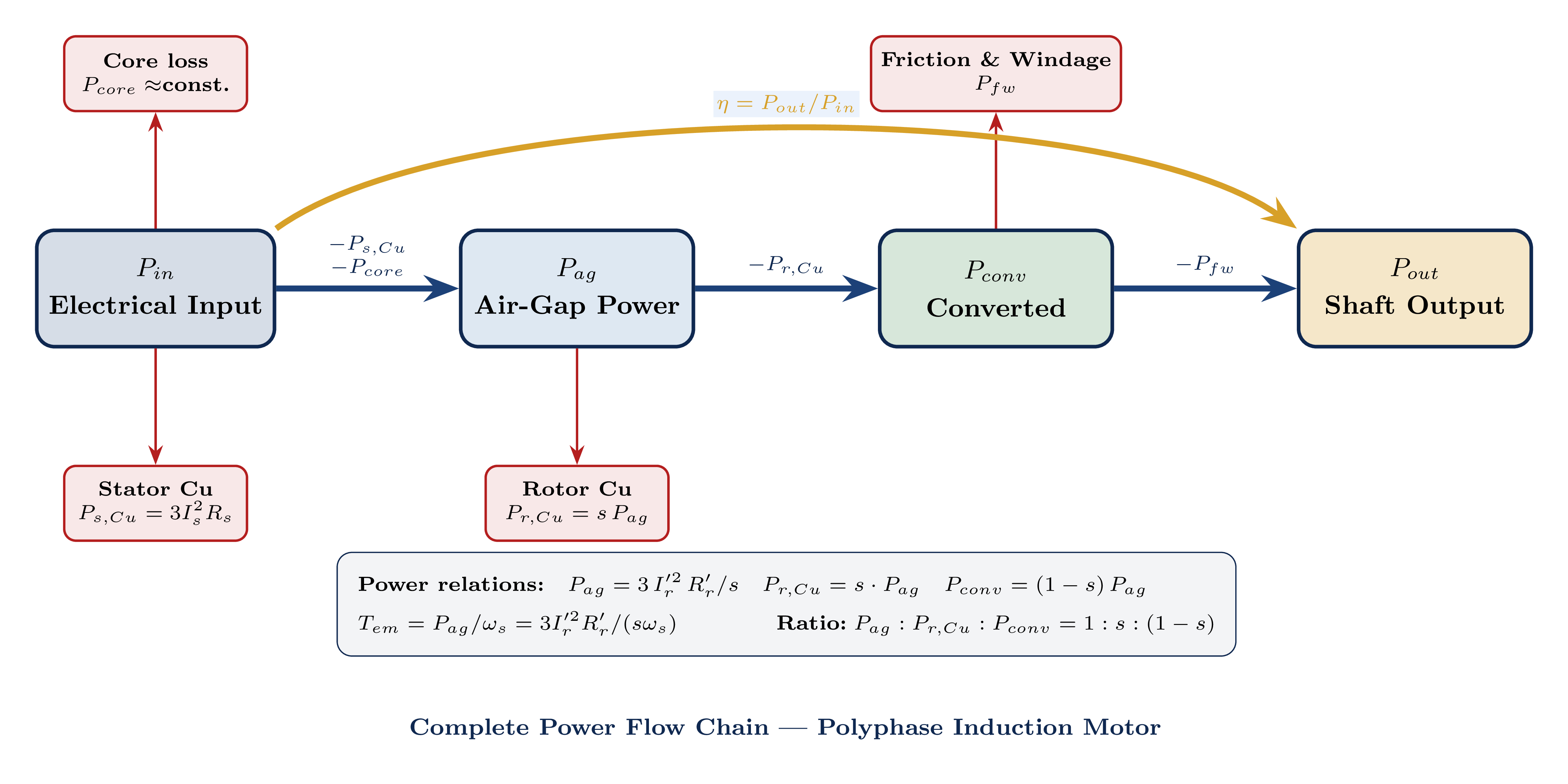
\(P_{fw}\) = friction & windage losses
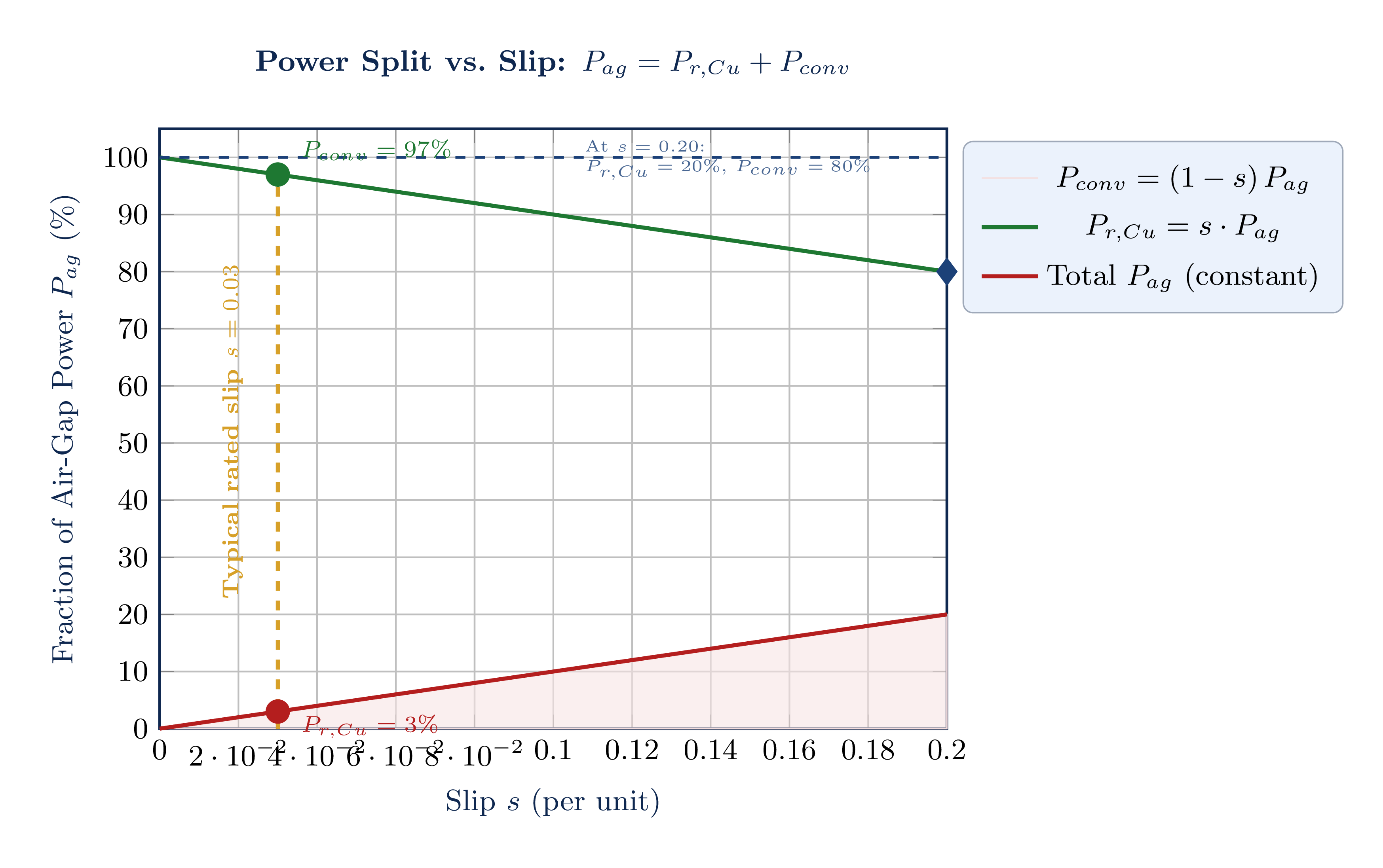
At \(s = 0.03\): only 3% of air-gap power is lost as rotor heat. Large motors use very small rated slip (0.5–2%) to achieve high efficiency — at \(s = 0.01\), only 1% of air-gap power is wasted.
Electromagnetic Torque
| Approach | Formula |
|---|---|
| From \(P_{ag}\) | \(T_{em} = \dfrac{P_{ag}}{\omega_s}\) |
| From \(P_{conv}\) | \(T_{em} = \dfrac{P_{conv}}{\omega_r}\) |
| From circuit | \(T_{em} = \dfrac{3\,I_r'^{\,2}\,R_r'}{s\,\omega_s}\) |
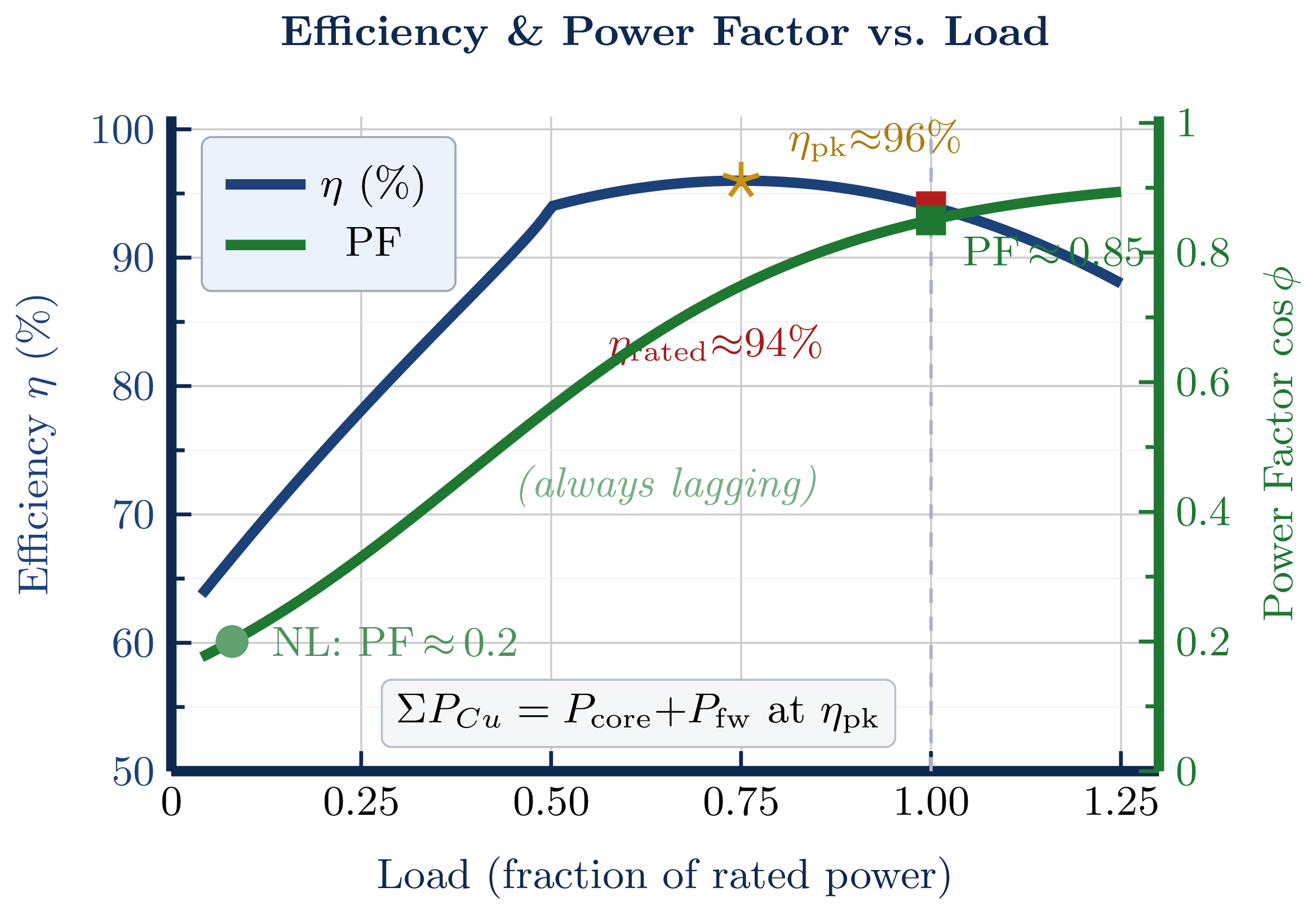
Efficiency & Power Factor vs. Load
Variable losses: \(P_{s,Cu}\), \(P_{r,Cu}\) (rise with load)
Fixed losses: \(P_{core}\), \(P_{fw}\) (approx. constant)
Always lagging due to \(I_m\) component. Poor at light loads.
| Motor Size | Efficiency \(\eta\) | Power Factor |
|---|---|---|
| Small (<5 kW) | 75–88% | 0.70–0.80 |
| Medium (5–100 kW) | 88–94% | 0.80–0.87 |
| Large (>100 kW) | 93–97% | 0.85–0.92 |
- Fixed losses dominate \(P_{in}\)
- \(I_s \approx I_m\) ⇒ very low PF
- Running oversized motors at light load wastes energy
- Peak efficiency occurs at approximately 75% rated load where variable losses equal fixed losses
Lecture Summary
- Stator = primary; Rotor = short-circuited rotating secondary
- Referred quantities: \(R_r' = a^2 R_r\), \(X_r' = a^2 X_r\), \(a = N_s/N_r\)
- Full: \(R_s\), \(jX_s\), \(R_c \parallel jX_m\), \(R_r'/s\), \(jX_r'\)
- Simplified: drop \(R_c\); use \(jX_m\) shunt only
- \(P_{ag} : P_{r,Cu} : P_{conv} = 1 : s : (1-s)\)
- \(T_{em} = \dfrac{P_{ag}}{\omega_s} = \dfrac{3\,I_r'^{\,2}\,R_r'}{s\,\omega_s}\)
- \(I_m\) always \(90°\) lagging ⇒ PF always lagging
- No-load: \(I_s \approx I_m\), very low PF
- Rated load: PF ≈ 0.75–0.90
Torque-slip characteristics via Thévenin equivalent, maximum torque analysis, NEMA design classes, and parameter measurement from standard motor tests.