1. Operating Modes of DC Drives
In variable-speed applications, a DC motor operates in different modes:
-
Motoring
Normal driving operation -
Regenerative Braking
Energy recovery to supply -
Dynamic Braking
Energy dissipation in resistor
-
Plugging
Reverse voltage braking -
Four-Quadrant Operation
Forward/reverse motoring and braking
Implementation
Different modes require switching power semiconductor devices and contactors to reconfigure field and armature circuits.
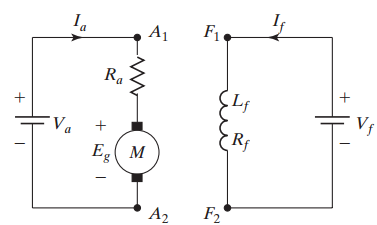
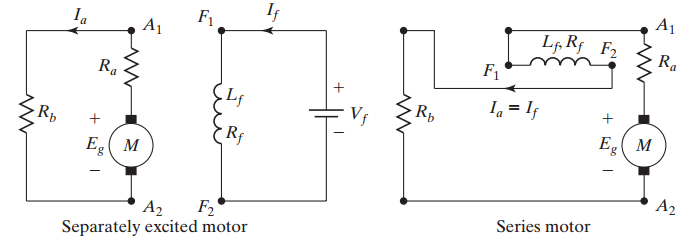
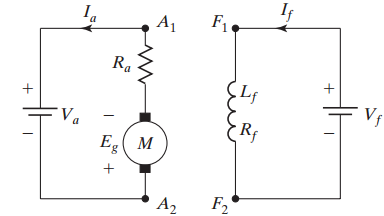
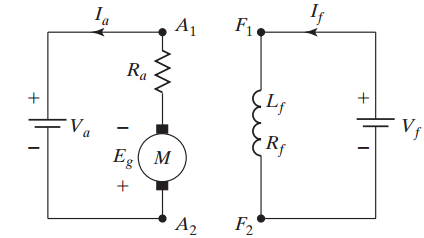
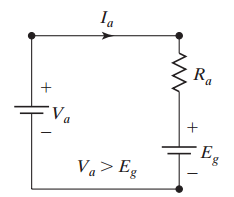
1.1 Motoring Mode
Characteristics:
- Back EMF: \(E_g < V_a\) (supply voltage)
- Both \(I_a > 0\) and \(I_f > 0\)
- Motor develops torque to meet load demand
- Energy flows from supply to motor
- Normal driving operation
Governing Equations:
Condition: \(V_a > E_g\), \(I_a, I_f > 0\)
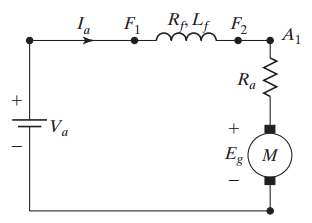
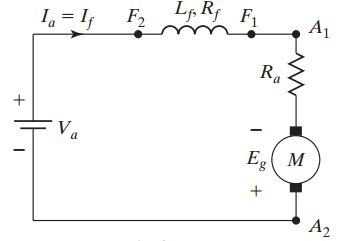
Characteristics:
- Series connection: \(I_a = I_f\)
- High starting torque capability
- Torque proportional to current squared
- Voltage distributed across total resistance
Governing Equations:
Advantage: Excellent for traction applications requiring high starting torque.
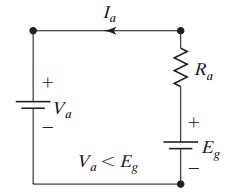
1.2 Regenerative Braking
What is Regenerative Braking?
Operating Principle:
- Motor acts as a generator
- Kinetic energy → electrical energy
- Energy returned to the supply
- Reduces overall energy consumption
- Environmentally friendly and cost-effective
Applications:
- Electric vehicles
- Elevators and cranes
- Railway traction systems
- Industrial drives with frequent stops
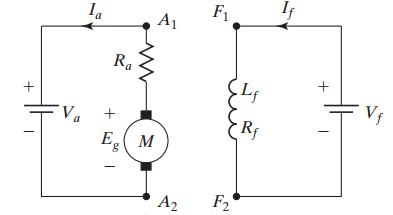
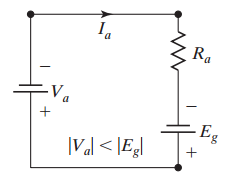
Conditions for Regenerative Braking
- Back EMF exceeds supply: \(E_g > V_a\)
- Armature current reverses: \(I_a < 0\)
- Field current remains positive: \(I_f > 0\)
- Supply must be receptive (able to accept power)
Operating Principle:
- Motor rotates due to inertia or load
- Generated EMF exceeds supply voltage
- Current flows back to supply
- Braking torque opposes motion
- Speed decreases gradually
Governing Equations:
Energy Flow: Motor → Supply
Special Requirements:
- Motor must operate as self-excited generator
- Field current must aid residual flux
- Reverse either armature or field terminals (not both)
- Requires careful control to maintain excitation
Critical Condition
For self-excitation to occur, the field current direction must reinforce residual magnetism in the field winding.
Challenge: Maintaining stable voltage buildup during braking.
1.3 Dynamic Braking
What is Dynamic Braking?
Operating Principle:
- Armature disconnected from supply
- Armature connected to braking resistor
- Kinetic energy dissipated as heat
- No energy returned to supply
- Independent of supply availability
Advantages:
- Simple implementation
- No receptive supply required
- Smooth, controlled braking
- Effective at high speeds
Disadvantages:
- Energy wasted as heat
- Requires heat dissipation capacity
- Less efficient than regenerative braking
Key Condition
Field excitation must be maintained during braking operation.
Operating Principle:
- Armature disconnected from supply
- Armature terminals connected to resistor \(R_B\)
- Field excitation maintained separately
- Generated EMF drives current through resistor
- Braking torque proportional to speed
Governing Equations:
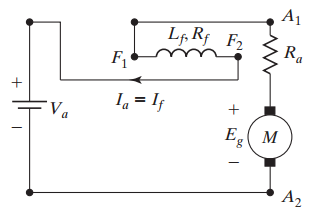
Special Configuration:
- Armature and field must be reconnected
- Field can be connected in series or parallel with armature
- Both connected across braking resistor
- Ensures field excitation is maintained
Governing Equations – Series Configuration:
Note: Field-armature reconfiguration ensures adequate excitation during braking.
1.4 Plugging
What is Plugging?
- A reverse voltage braking method
- Supply polarity is reversed while the motor is still running
- Both \(V_a\) and back-EMF \(E_g\) oppose armature current in the same direction
- Produces the largest braking torque among all electrical braking methods
Operating Principle:
- Reversed \(V_a\) and \(E_g\) act additively against current flow
- Results in very high armature current
- A current-limiting resistor \(R_p\) is inserted in series
- Motor must be disconnected as speed approaches zero
Critical Warning
If not disconnected at zero speed, the motor will accelerate in the reverse direction .
Governing Equations:
Characteristics:
- Fastest braking action among all methods
- Very high armature current during braking
- Significant energy dissipated in \(R_p\)
- Considerable mechanical stress on the motor shaft
Applications:
- Emergency stops
- Rapid direction reversals
- Elevators and hoists
- Machine tools requiring quick halts
Limitations:
- Very low energy efficiency
- High thermal stress on resistor and windings
- Requires robust current-limiting circuitry
- Needs automatic disconnection sensing at \(\omega = 0\)
Comparison Note
Plugging offers the fastest stop but at the cost of highest energy loss and maximum mechanical stress compared to dynamic or regenerative braking.
1.5 Comparison of Braking Methods
| Parameter | Regenerative | Dynamic | Plugging |
|---|---|---|---|
| Energy Recovery | Yes | No | No |
| Braking Speed | Moderate | Moderate | Very Fast |
| Supply Required | Yes (receptive) | No | Yes |
| Energy Efficiency | High | Low | Very Low |
| Circuit Complexity | High | Low | Moderate |
| Current Magnitude | Normal | Normal | Very High |
| Typical Applications | Frequent stops | Emergency | Quick reversal |
| Initial Cost | High | Low | Moderate |
| Operating Cost | Low | Moderate | High |
Selection Criteria
Choose based on: energy recovery needs, braking frequency, supply receptivity, and cost constraints.
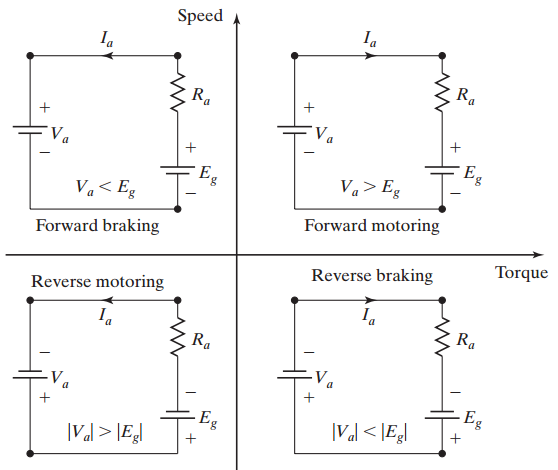
2. Four-Quadrant Operation
Quadrants Defined By:
- Torque direction: positive/negative
- Speed direction: positive/negative
Power Flow:
- Motoring (Q-I, Q-III): Supply → Motor
- Braking (Q-II, Q-IV): Motor → Supply
Applications:
- Elevators and lifts
- Rolling mills
- Machine tools
- Electric vehicles
Characteristics:
- Speed: Positive (\(\omega > 0\))
- Torque: Positive (\(T_d > 0\))
- \(V_a > 0\), \(E_g > 0\), \(I_a > 0\)
- Normal forward driving
- Power flows from supply to motor
Governing Conditions:
Energy Flow
Supply → Power → Motor → Torque → Load
Characteristics:
- Speed: Positive (\(\omega > 0\))
- Torque: Negative (\(T_d < 0\))
- \(V_a > 0\), \(E_g > 0\), \(I_a < 0\)
- Forward regenerative braking
- Power flows from motor to supply
Governing Conditions:
Energy Flow
Load → KE → Motor → Power → Supply
Characteristics:
- Speed: Negative (\(\omega < 0\))
- Torque: Negative (\(T_d < 0\))
- \(V_a < 0\), \(E_g < 0\), \(I_a < 0\)
- Normal reverse driving
- Power flows from supply to motor
Governing Conditions:
Implementation
Reverse field excitation to reverse \(E_g\) polarity, or reverse armature terminals.
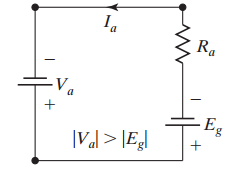
Characteristics:
- Speed: Negative (\(\omega < 0\))
- Torque: Positive (\(T_d > 0\))
- \(V_a < 0\), \(E_g < 0\), \(I_a > 0\)
- Reverse regenerative braking
- Power flows from motor to supply
Governing Conditions:
Energy Flow
Load → KE → Motor → Power → Supply
| Parameter | Q-I | Q-II | Q-III | Q-IV |
|---|---|---|---|---|
| Operation | Fwd Motoring | Fwd Braking | Rev Motoring | Rev Braking |
| Speed \(\omega\) | + | + | − | − |
| Torque \(T_d\) | + | − | − | + |
| Voltage \(V_a\) | + | + | − | − |
| EMF \(E_g\) | + | + | − | − |
| Current \(I_a\) | + | − | − | + |
| Voltage Relation | \(V_a > E_g\) | \(E_g > V_a\) | \(|V_a| > |E_g|\) | \(|E_g| > |V_a|\) |
| Power Flow | Supply→Motor | Motor→Supply | Supply→Motor | Motor→Supply |
| Mode Type | Motoring | Regenerative | Motoring | Regenerative |
Key Requirement for Q-III and Q-IV
Field excitation or armature polarity must be reversed for operations in Quadrants III and IV.
3. Key Takeaways
-
Operating Modes:
- DC motors support multiple operating modes: motoring, regenerative braking, dynamic braking, and plugging.
- Each mode has distinct voltage-current relationships and energy flow patterns.
-
Energy Efficiency:
- Regenerative braking offers highest efficiency by returning energy to supply.
- Dynamic braking provides supply-independent operation at cost of efficiency.
- Plugging provides fastest braking but with highest losses.
-
Four-Quadrant Operation:
- Enables complete bidirectional control (forward/reverse motoring and braking).
- Critical for applications requiring frequent direction reversals.
- Requires appropriate power electronic converters and control schemes.