By the end of this lecture, you will be able to:
Define an electric drive system and identify its key components
Explain the historical evolution from traditional to modern drive systems
Compare the advantages and limitations of electric drives
Classify electric drives based on their configuration
Appreciate the role of power electronics in modern industrial applications
What is an Electric Drive?
General Drive System
A drive is a combination of:
Prime mover (energy source)
Transmission equipment (gears, belts, couplings)
Mechanical working load (the machine being driven)
Examples of Prime Movers
Internal combustion engines (diesel, petrol)
Steam turbines
Hydraulic motors
Electric motors ← Our focus!
Electric Drive
An electric drive system is a comprehensive system that uses an electric motor as the prime mover to convert electrical energy into controlled mechanical motion.
Key Characteristics
Modern electric drives integrate:
Power electronic converters (for flexible control)
Electric motors (various types)
Control systems (microprocessors, DSPs)
Mechanical loads (application-specific)
Feedback sensors (speed, position, current)
Industrial Importance:
60–70% of industrial electricity consumed by motors
Critical for automation and manufacturing
Essential for energy efficiency goals
Growing market in EVs and renewables
Engineering Skills:
Integration of multiple domains:
Power electronics
Electrical machines
Control systems
Mechanical engineering
Problem-solving for real applications
Career Relevance
Electric drive engineers are in high demand in industries like automotive, aerospace, robotics, manufacturing, and renewable energy.
Historical Evolution of Drive Systems
Challenges with early motor control:
Technical Limitations:
Bulky and inefficient equipment
Very limited speed control methods
Poor dynamic response
High maintenance requirements
Noisy operation
Control Methods Used:
Resistance insertion (wasteful)
Autotransformers (bulky)
Complex multimachine systems
Ward-Leonard sets (expensive)
Mechanical clutches and brakes
Major Problem
Motor selection was dictated by available power source, not by application requirements. Limited flexibility!
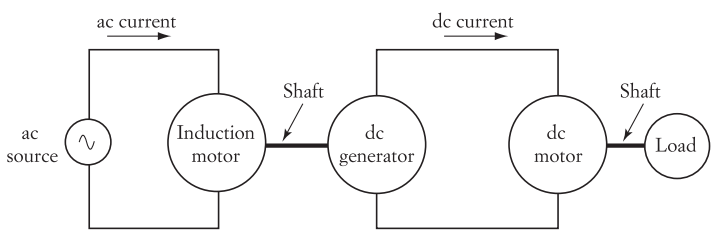
How it worked:
AC motor drives DC generator
Generator output controls DC motor
Variable voltage → variable speed
Drawbacks:
Very expensive (3 machines!)
Low efficiency (<60%)
Frequent maintenance
Large footprint
Historical Note
Despite inefficiency, Ward-Leonard sets were the gold standard for precise DC motor control until the 1970s. Some legacy installations still exist today!
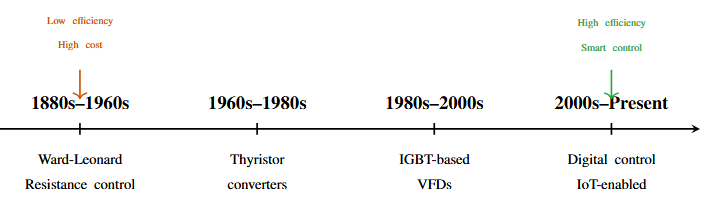
Key technological breakthroughs:
1960s–1970s: Thyristor-based converters
Phase-controlled rectifiers for DC drives
Cycloconverters for large AC drives
1980s–1990s: High-power transistors (BJT, MOSFET, IGBT)
PWM inverters for AC motor control
Variable frequency drives (VFDs) become affordable
2000s–Present: Digital control and integration
Microprocessors and DSPs
Advanced control algorithms (vector control, direct torque control)
Smart drives with built-in protection and diagnostics
What Changed?
Efficiency: From <60% to >95%
Size: From room-sized to compact enclosures
Cost: From prohibitively expensive to affordable
Flexibility: Any motor can work with any power source
Intelligence: Built-in speed control, protection, and diagnostics
Reliability: Solid-state devices with minimal maintenance
Economic Impact
The transition from traditional drives to modern solid-state drives created a multi-billion dollar retrofitting industry in the US alone during the 1990s–2000s.
The Trend
Increasing efficiency and power density
Decreasing cost and size
Growing intelligence and connectivity
Advantages and Limitations
Flexibility & Performance:
Wide power range (mW to MW)
Wide torque-speed range
Four quadrant operation
Quick start/stop capability
Smooth speed control
High overload capacity
Efficiency:
High efficiency (90–95%+)
Regenerative braking possible
Energy savings in variable loads
Environmental & Safety:
Zero exhaust emissions
Low noise level
No hazardous fuel storage
Clean operation (food, pharma)
Safe in enclosed spaces
Maintenance & Economics:
Minimal servicing required
Long operational life
Gearless coupling option
Various design ratings
Lower total cost of ownership
Main Drawbacks
Power Supply Dependency:
Require continuous electrical power supply
Grid dependence (not always available)
Backup power needed for critical applications
Vehicle Propulsion Challenges:
Power supply equipment must be carried onboard
Battery systems add significant weight and bulk
Limited range compared to liquid fuels (energy density issue)
Long charging times (compared to refueling)
Power-to-Weight Ratio:
Lower than internal combustion engines for high power
Due to iron saturation in magnetic circuits
Cooling requirements add weight
| Parameter | Electric Drive | IC Engine |
|---|---|---|
| Efficiency | 90–95% | 25–40% |
| Torque at zero speed | High | Zero (needs clutch) |
| Speed control | Excellent | Limited |
| Emissions (local) | Zero | High |
| Noise | Low | High |
| Maintenance | Minimal | Frequent |
| Energy density | Low (battery) | High (fuel) |
| Cost (initial) | Medium-High | Medium |
Conclusion
Electric drives excel in efficiency, control, and environmental impact. IC engines have advantages in energy density and range for mobile applications.
Classification of Electric Drives
Three main types based on mechanical arrangement:
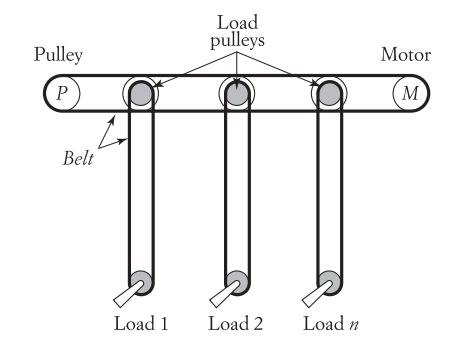
Group Drive (Line Shaft Drive)
Single motor drives multiple loads through common shaft
Uses belts, pulleys, and mechanical couplings
Oldest form (late 1800s)
Individual Drive
Single motor for single mechanism/machine
Most common configuration today
Direct or through single-stage transmission
Multimotor Drive
Separate motor for each operation/axis
Coordinated control for complex tasks
Used in robotics, CNC machines, rolling mills
Status
Rarely used today – replaced by individual drives
Characteristics:
Oldest form (1880s–1920s)
Common in early factories
All machines run when motor runs
Multistepped pulleys for speed adjustment
Advantages:
Economical (one motor)
Lower initial cost
Disadvantages:
Low efficiency (40–50%)
Complete shutdown for servicing
Limited flexibility
Safety hazards
High noise level
Common Applications
Household appliances, pumps, compressors, fans, conveyors, elevators, single-axis machines
Characteristics:
One motor per machine
All operations of that machine performed by single motor
May use transmission (gears, belts)
Emerged in 1920s, dominant since 1950s
Advantages:
Higher efficiency (70–85%)
Independent operation
Easier maintenance
Better safety
Flexible layout
Applications
Industrial robots, CNC machines, rolling mills, paper machines, printing presses, flight control systems
Characteristics:
Separate motor for each function/axis
Synchronized control system
Complex coordination required
Emerged with automation (1960s)
Advantages:
Optimum operation per axis
High precision
Flexible programming
Enables automation
Challenge:
Complex control algorithms
Higher cost
6-Axis Industrial Robot:
Each joint has dedicated servo motor
Real-time coordination of all 6 motors
Position accuracy: ±0.1 mm
Complex trajectory planning
Control Requirements:
Position feedback (encoders)
Current control (torque)
Speed synchronization
Path interpolation
Collision avoidance
Why Multimotor?
Each axis needs independent control
Varying load on each joint
Complex motion patterns
Impossible with single motor
Modern Trends:
Integrated motor + drive + encoder
EtherCAT communication
Distributed control
AI-based path optimization
Key Insight
Multimotor drives enable automation and precision that was impossible with earlier drive configurations.
| Aspect | Group Drive | Individual Drive | Multimotor Drive |
|---|---|---|---|
| Era | 1880s–1920s | 1920s–Present | 1960s–Present |
| Efficiency | 40–50% | 70–85% | 75–90% |
| Flexibility | Very Low | Medium | Very High |
| Maintenance | Difficult | Easy | Moderate |
| Initial Cost | Low | Medium | High |
| Control Complexity | Simple | Simple | Complex |
| Typical Power | 10–100 kW | 0.1–1000 kW | 0.1–100 kW/motor |
| Current Usage | Obsolete | Dominant | Growing |
Selection Criteria
Choose based on: application requirements, precision needs, flexibility, budget, and automation level.
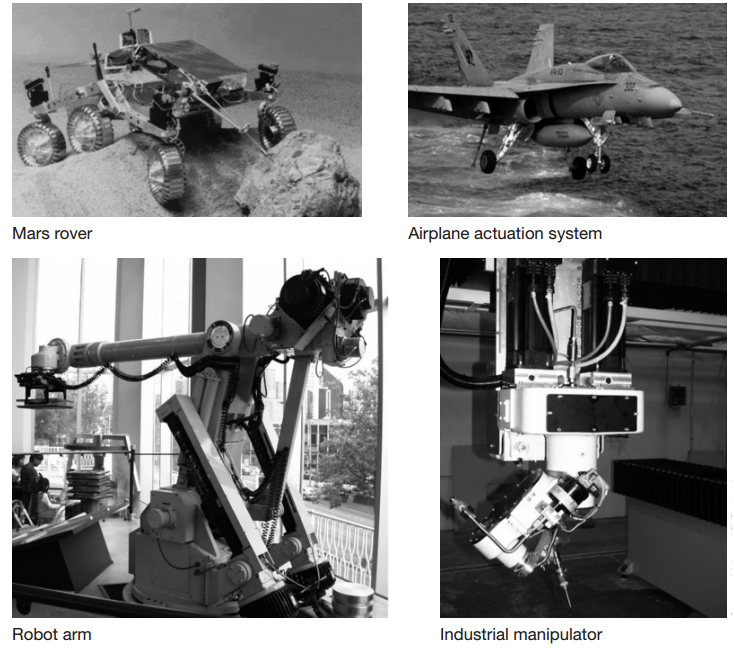
Modern Applications
Industrial:
Robotics and automation
Process control (chemical, pharma)
Manufacturing lines
Material handling
Textile machinery
Metal working (lathes, mills)
HVAC & Building:
Variable speed pumps
Fans and blowers
Compressors (chillers)
Elevators and escalators
Transportation:
Electric vehicles (cars, buses)
Railway traction
Marine propulsion
Airplane actuation (fly-by-wire)
Aerospace (satellites, rovers)
Consumer & Office:
Household appliances
Hard disk drives
Printers and copiers
Power tools
Drones
Everywhere!
Electric drives are ubiquitous in modern life – from the phone vibrator motor to MW-scale industrial systems.
Components:
Battery pack (400–800 V DC)
Inverter (DC to 3-phase AC)
Permanent magnet synchronous motor (PMSM)
Single-speed reduction gearbox
Electronic control unit (ECU)
Performance:
Power: 200–300 kW
Torque: 400–600 Nm
Efficiency: 90–95%
0–100 km/h: <4 seconds
Regenerative braking
Why Electric Drive Wins Here:
High torque from zero speed (no clutch needed)
Smooth, continuous torque
Four-quadrant operation (regeneration)
Precise control (traction control, stability)
Quiet operation and zero local emissions
Challenges:
Battery weight and cost
Energy density vs. gasoline
Charging infrastructure
Trend
Electric drives are rapidly replacing IC engines in transportation due to efficiency and environmental benefits.
Scenario: Industrial fan running 24/7, 100 HP (75 kW)
Traditional Control:
Motor runs at full speed
Flow control by damper/valve
Throttling wastes energy
Annual energy: 657,000 kWh
Cost @ $0.10/kWh: $65,700
With Variable Frequency Drive (VFD):
Motor speed adjusted to demand
Power ∝ speed³ (fan law)
20% speed reduction → 50% power saving!
Annual energy: 328,500 kWh
Cost: $32,850
Return on Investment
Annual savings: $32,850
VFD cost: ~$15,000
Payback period: <6 months
Plus: reduced maintenance, extended equipment life
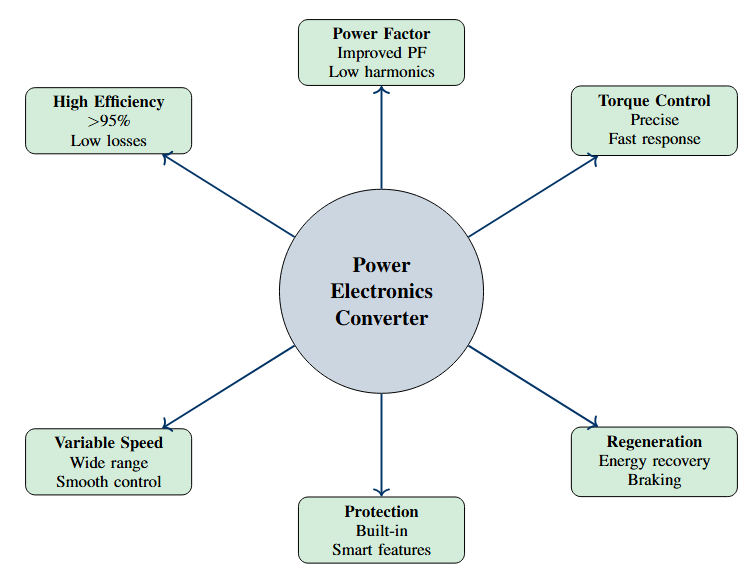
The Role of Power Electronics
Why Power Electronics is Critical
Power electronics enables:
Conversion: Transform electrical power to match motor requirements
Control: Adjust voltage, current, and frequency
Efficiency: Minimize losses during conversion
Flexibility: Use any motor with any power source
Intelligence: Implement advanced control algorithms
The Bridge
Power electronics acts as the intelligent interface between:
Fixed Power Source → Converter → Variable Speed Motor
Old Technology:
Mechanical contactors
Rheostats (variable resistors)
Rotating machines (Ward-Leonard)
Moving parts, wear and tear
Slow switching
Sparking and arcing
Solid State Technology:
Power semiconductor devices
No moving parts
Fast switching (kHz)
No wear (long life)
Silent operation
Compact size
Key Power Devices
Diodes: Uncontrolled rectification
Thyristors (SCR): Phase-controlled rectification
IGBTs: High-power PWM switching for inverters
MOSFETs: Fast switching for low-medium power
Bottom Line
Power electronics transformed electric drives from inefficient, inflexible systems to high-performance, intelligent solutions.
Summary and Looking Ahead
Electric drives convert electrical energy to controlled mechanical motion using electric motors as prime movers
Historical evolution shows dramatic improvement from Ward-Leonard (<60% efficient) to modern solid-state drives (>95% efficient)
Advantages: High efficiency, precise control, environmental benefits, low maintenance, wide applicability
Limitations: Power supply dependency, weight issues for mobile applications, lower power-to-weight ratio
Three configurations: Group drive (obsolete), Individual drive (common), Multimotor drive (automation)
Power electronics is the enabling technology that makes modern drives possible