Key equations derived:
EMF Equation
Torque Equation
Today's focus:
- How does armature circuit behave with resistance and inductance?
- What about the field circuit?
- How to model mechanical dynamics?
- How to combine electrical and mechanical subsystems?
Armature Circuit Modeling
Physical components in armature circuit:
Resistance:
- Copper winding resistance
- Brush contact resistance
- Combined as \(R_a\)
- Causes power loss (\(I_a^2 R_a\))
Inductance:
- Self-inductance of windings
- Magnetic energy storage
- Denoted as \(L_a\)
- Affects transient response
Back-EMF:
- Generated EMF \(E = K_e\omega_m\)
- Opposes applied voltage (Lenz's law)
- Speed-dependent voltage
- Key coupling between electrical and mechanical systems
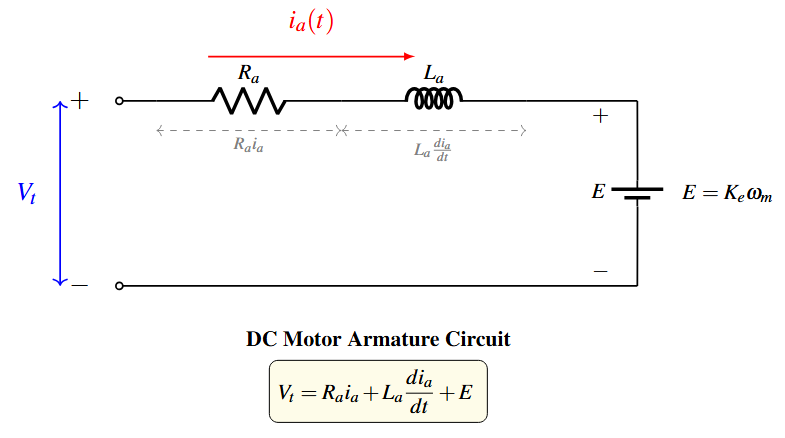
Note
The back-EMF \(E\) acts like a voltage source that opposes the applied voltage \(V\). Its magnitude depends on the rotor speed \(\omega_m\).
Applying Kirchhoff's Voltage Law (KVL) around armature circuit:
Substituting \(E = K_e\omega_m\):
Dynamic Armature Equation
This is a first-order differential equation relating:
- Applied voltage \(V\) (input)
- Armature current \(I_a\) (electrical variable)
- Rotor speed \(\omega_m\) (mechanical variable)
In steady state, all variables are constant:
Steady-State Armature Equation
Solving for armature current:
Observations:
- As speed increases, back-EMF increases
- Higher back-EMF reduces armature current
- At no load, \(I_a\) is small, \(E \approx V\)
Rearranging the dynamic equation:
Electrical Time Constant
Physical significance:
- Determines how fast armature current responds to voltage changes
- Typical values: 5–50 ms (milliseconds)
- Smaller \(\tau_a\) \(\rightarrow\) faster electrical response
- After time \(\tau_a\), current reaches approximately 63% of its final value
Multiplying armature equation by \(I_a\):
Power Balance
In steady state: \(\dfrac{dI_a}{dt} = 0\)
- \(EI_a\) = Air gap power = Electromagnetic power developed
- \(R_a I_a^2\) = Copper loss (heat dissipated)
Field Circuit Modeling
Separately Excited DC Motor:
- Field and armature circuits are independent
- Field supplied from separate DC source
- Allows independent control of flux and torque
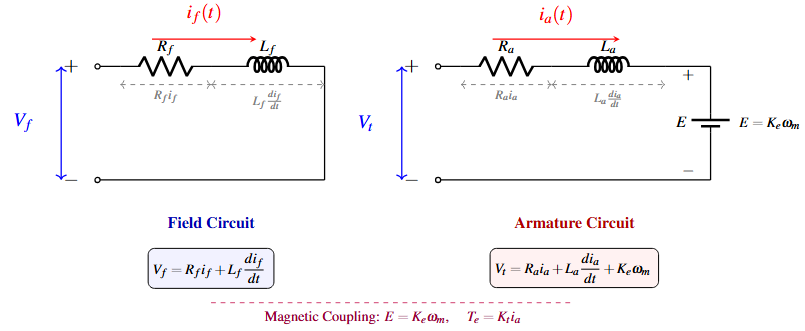
Applying KVL to field circuit:
Where:
- \(V_f\) = Field supply voltage (DC)
- \(R_f\) = Field winding resistance (typically large)
- \(L_f\) = Field winding inductance (very large)
- \(I_f\) = Field current
Field Time Constant
Typical values: 0.5 to 2 seconds
Key observation: Field circuit is much slower than armature circuit (\(\tau_f \gg \tau_a\))
For unsaturated magnetic circuit:
Where:
- \(\phi\) = Air-gap flux per pole (Wb)
- \(L_{af}\) = Mutual inductance between armature and field
- \(I_f\) = Field current (A)
Torque constant relationship:
For constant field current, \(K_e\) and \(K_t\) are constants.
For many control applications:
- Field current is kept constant by a controlled supply
- Field dynamics are much slower than armature and mechanical dynamics
- Assumption: \(I_f = \text{constant}\) during transients
Practical Note
In armature-controlled DC motors, field excitation is fixed, and motor speed/torque is controlled by varying armature voltage. This simplifies the analysis significantly.
Mechanical System Modeling
Rotating mechanical system includes:
Inertia (J):
- Rotor inertia
- Load inertia (reflected to motor shaft)
- Unit: kg·m²
- Resists changes in speed
Friction (B):
- Viscous friction (proportional to speed)
- Bearing friction
- Windage losses
- Unit: N·m·s/rad
Load Torque (\(T_L\)):
- External torque demand from the load
- Can be constant, speed-dependent, or time-varying
- Unit: N·m
Applying Newton's law to rotating system:
Net torque = Electromagnetic torque - Friction torque - Load torque:
Dynamic Mechanical Equation
Where:
- \(T_e = K_e I_a\) = Electromagnetic torque developed by motor
- \(B\omega_m\) = Friction torque (opposes motion)
- \(T_L\) = Load torque (opposes motion)
Rearranging the mechanical equation:
Mechanical Time Constant
Physical significance:
- Determines how fast the motor speed responds to torque changes
- Typical values: 0.1 to 5 seconds
- Slower than electrical time constant: \(\tau_m \gg \tau_a\)
- After time \(\tau_m\), speed reaches approximately 63% of its final value
In steady state: \(\dfrac{d\omega_m}{dt} = 0\)
Steady-State Torque Balance
Interpretation:
- Electromagnetic torque must balance friction and load torque
- At no-load (\(T_L = 0\)): \(T_e = B\omega_m\)
- Higher load torque requires higher electromagnetic torque
Load Torque Characteristics
Load torque can have different speed dependencies:
1. Constant Torque Load
Examples: Hoists, cranes, conveyor belts, friction loads
Torque independent of speed
2. Linear (Viscous) Load
Examples: Generators with resistive load, some pumps
Torque proportional to speed
3. Quadratic (Fan-type) Load
Examples: Fans, blowers, centrifugal pumps
Torque proportional to square of speed (fluid dynamics)
4. Constant Power Load
Examples: Machine tools, traction applications
Torque inversely proportional to speed
Different load types affect motor behavior differently:
- Constant torque: Motor must develop constant torque regardless of speed
- Fan-type load: Light torque at low speed, increases rapidly at high speed
- Constant power: High torque at low speed, decreases as speed increases
Design Consideration
Motor selection and drive design must account for the specific load torque characteristic to ensure adequate performance across the operating range.
Coupled Electromechanical Equations
For a separately excited DC motor with constant field current:
Electrical Subsystem
Mechanical Subsystem
Coupling Equations
This is a coupled system of two first-order differential equations
Define state variables:
- \(x_1 = I_a\) (armature current)
- \(x_2 = \omega_m\) (rotor speed)
State equations:
State-Space Form
Input: \(V\) (control), \(T_L\) (disturbance)
Output: \(\omega_m\) (typically the variable of interest)
In compact matrix notation:
Standard form: \(\dot{\mathbf{x}} = \mathbf{A}\mathbf{x} + \mathbf{B}\mathbf{u}\)
where:
- \(\mathbf{x} = [I_a \quad \omega_m]^T\) = state vector (2\(\times\)1)
- \(\mathbf{u} = [V \quad T_L]^T\) = input vector (2\(\times\)1)
- \(\mathbf{A}\) = system matrix (2\(\times\)2)
- \(\mathbf{B}\) = input matrix (2\(\times\)2)
Block Diagram Representation
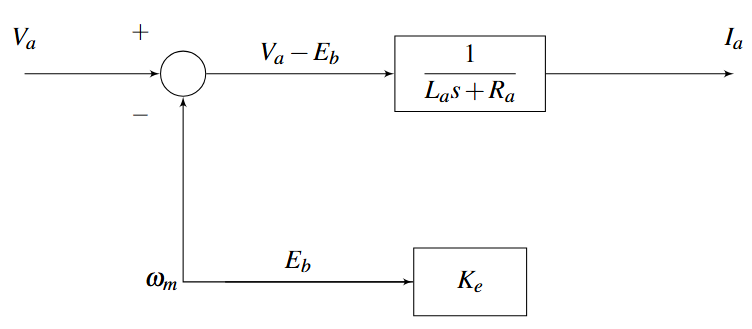
Transfer function from \((V - E)\) to \(I_a\):

Transfer function:
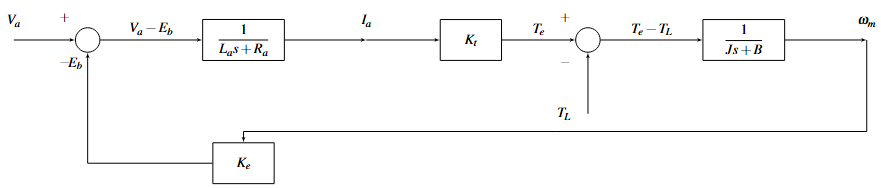
For no-load condition (\(T_L = 0\)):
Using block diagram algebra:
Simplifying:
Speed Transfer Function
This is a second-order system with both electrical and mechanical dynamics.
If \(L_a\) is very small, we can assume: \(L_a \approx 0\)
Transfer function becomes:
First-Order Approximation
DC gain: \(\dfrac{K_t}{R_a B + K_e K_t}\)
Time constant: \(\tau = \dfrac{R_a J}{R_a B + K_e K_t}\)
Summary and Key Takeaways
Armature Circuit (Dynamic)
Field Circuit (Dynamic)
Mechanical System (Dynamic)
Coupling equations:
Time constant hierarchy:
- Armature response is fastest (electrical)
- Mechanical response is intermediate
- Field response is slowest
Control implications:
- Armature voltage control gives fast torque/speed control
- Field control is slower but affects flux and torque capability
- In transient analysis, field current often assumed constant
-
Armature circuit modeling
- \(R_a\), \(L_a\), and back-EMF
- Dynamic and steady-state equations
-
Field circuit modeling
- Separate excitation
- Much slower dynamics than armature
-
Mechanical system modeling
- Inertia, friction, and load torque
- Newton's law for rotation
-
Electromechanical coupling
- Two-way interaction through \(K_e\)
- State-space and block diagram representation
-
Load characteristics
- Different types: constant, linear, quadratic, constant power