Normalised intermittent back-EMF
\[
e_n = \frac{e_m}{e_r} = \frac{75.29}{105.1} = \mathbf{0.716\,\text{p.u.}}
\]
This is also the normalised base speed: \(\omega_{m1n} = e_n = 0.716\,\text{p.u.}\)
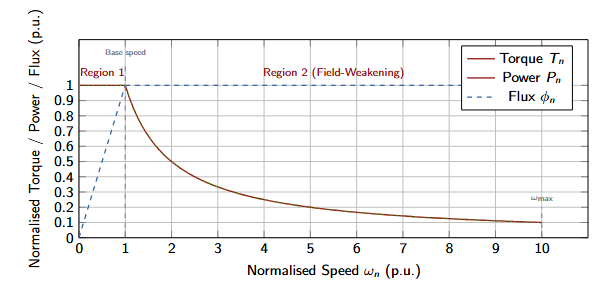
Field-weakening flux requirement
To maintain \(E_b = e_m\) at speed \(\omega_{mn}\):
\[
\phi_{fn} = \frac{e_n}{\omega_{mn}} = \frac{0.716}{\omega_{mn}}
\]
Normalised torque in Region 2
\[
T_{en} = I_{an}\cdot\phi_{fn} = 3 \times \frac{0.716}{\omega_{mn}} = \frac{2.148}{\omega_{mn}}
\]
Maximum intermittent speed
Flux limit is the same: \(\phi_{\min} = 0.1\,\text{p.u.}\)
\[
\begin{aligned}
\omega_{mn,\max} &= \frac{e_n}{\phi_{\min}} \\
&= \frac{0.716}{0.1} \\
&= \mathbf{7.16\,\text{p.u.}} \\
\omega_{m,\max} &= 7.16 \times 137.56 \\
&= 984.9\,\text{rad/s}
\end{aligned}
\]
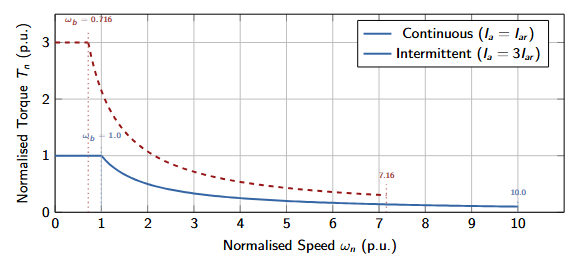
Region 2 Equations (Intermittent, \(0.716 < \omega_n \leq 7.16\))
\[\phi_{fn} = \frac{0.716}{\omega_{mn}}\]
\[T_{en} = \frac{2.148}{\omega_{mn}}\]
\[P_e = T_e\,\omega_m = 3\times0.716 = 2.148\,\text{p.u.}\quad\text{(const.)}\]
Speed Range Reduction
Intermittent field weakening extends only to
7.16 p.u. (vs. 10 p.u. for continuous), because the higher \(I_{\max}R_a\) drop reduces the available back-EMF at the base point, shifting the entire field-weakening region downward.
Verification of Power Constancy
\[
\begin{aligned}
\text{At } \omega_{mn} &= 2\,\text{p.u.}: \\
\quad T_{en} & = \frac{2.148}{2} = 1.074\,\text{p.u.}, \\
P_n &= 1.074 \times 2 = 2.148\,\text{p.u.} \;\checkmark \\[2em]
\text{At } \omega_{mn} &= 7.16\,\text{p.u.}: \\
\quad T_{en} &= \frac{2.148}{7.16} = 0.300\,\text{p.u.}, \\
P_n &= 0.300 \times 7.16 = 2.148\,\text{p.u.} \;\checkmark
\end{aligned}
\]