The Shift to Closed-Loop Control
Open-Loop Limitations
- No load compensation
- Sensitive to aging/temperature
- Drift in speed/position
- Voltage fluctuation issues
- No safety mechanisms
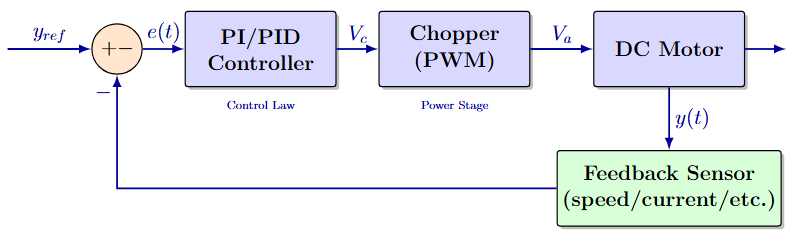
Closed-Loop Advantages
- Self-correcting logic
- High precision accuracy
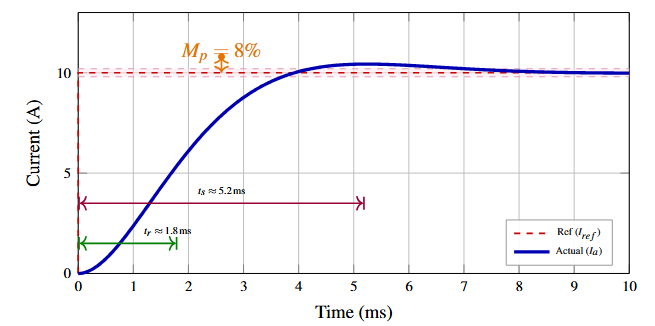
- Faster settling times
- Robust to variations
- Built-in protection
Real-World Case: The Elevator
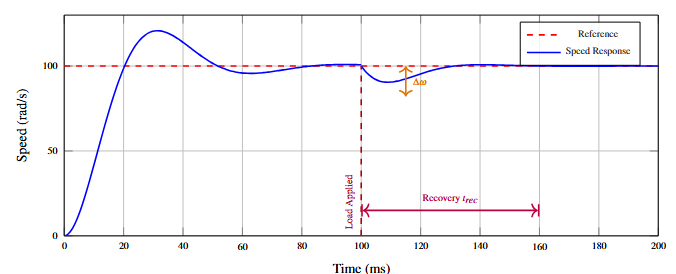
The motor must maintain speed regardless of the passenger load and stop perfectly level with the floor. Only closed-loop feedback ensures this reliability.