Introduction
-
Alternative to line search methods for nonlinear optimization
-
Basic idea: Approximate the objective function in a neighborhood (trust region)
-
At each iteration:
-
Build a local model (usually quadratic) within trust region radius \(\Delta_k\)
-
Solve constrained subproblem to find step within trust region
-
Evaluate actual vs. predicted improvement
-
Adjust trust region radius based on performance
-
-
Particularly effective for non-convex problems
Key Components
-
Local model (typically quadratic approximation)
-
Trust region radius \(\Delta_k\)
-
Acceptance/rejection criteria
-
Radius adjustment strategy
Trust Region vs Line Search
Line Search:
-
Fix direction, choose step length
-
\(x_{k+1} = x_k + \alpha_k p_k\)
-
May fail for indefinite Hessians
-
Can take inefficient zigzag paths
Trust Region:
-
Fix step length, choose direction
-
\(x_{k+1} = x_k + p_k\) with \(\|p_k\| \leq \Delta_k\)
-
Handles indefinite Hessians naturally
-
Adapts both direction and magnitude
When to Use Trust Region
-
Non-convex optimization problems
-
Noisy or discontinuous derivatives
-
Problems where Newton’s method struggles
Mathematical Formulation
-
Original problem:
\[\min_{x \in \mathbb{R}^n} f(x)\] -
Trust region subproblem:
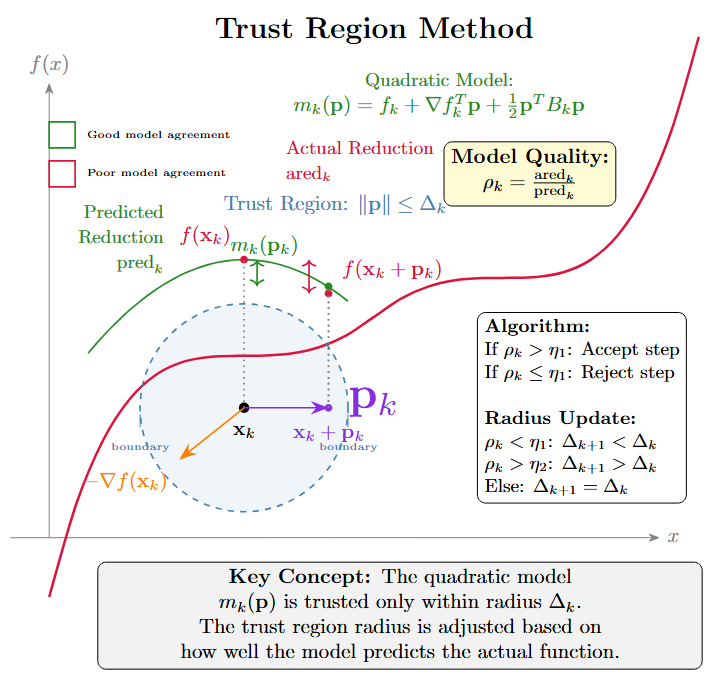
\[\min_p m_k(p) = f_k + \nabla f_k^T p + \frac{1}{2}p^T B_k p\]\[\text{subject to } \|p\| \leq \Delta_k\]where:
-
\(f_k = f(x_k)\), \(\nabla f_k = \nabla f(x_k)\)
-
\(B_k\) is Hessian or approximation
-
\(\Delta_k\) is trust region radius
-
\(\|\cdot\|\) is typically \(\ell_2\) norm
-
Trust Region Algorithm
Algorithm: Trust Region Method
- Initialize \( x_0 \), \( \Delta_0 > 0 \), \( 0 < \eta_1 < \eta_2 < 1 \)
- For \( k = 0, 1, 2, \ldots \):
- Solve trust region subproblem to get \( p_k \)
- Compute actual reduction: \( \text{ared}_k = f(x_k) - f(x_k + p_k) \)
- Compute predicted reduction: \( \text{pred}_k = m_k(0) - m_k(p_k) \)
- Compute ratio: \( \rho_k = \frac{\text{ared}_k}{\text{pred}_k} \)
- If \( \rho_k > \eta_1 \):
- \( x_{k+1} = x_k + p_k \) (Accept step)
- Else:
- \( x_{k+1} = x_k \) (Reject step)
- Update trust region radius \( \Delta_{k+1} \) based on \( \rho_k \)
Subproblem Solution
Exact Solution (KKT Conditions)
The exact solution \(p^*\) satisfies:
-
Two cases:
-
Interior solution (\(\|p^*\| < \Delta_k\)): \(\lambda = 0\), unconstrained minimizer
-
Boundary solution (\(\|p^*\| = \Delta_k\)): \(\lambda > 0\), constrained
-
-
Exact solution computationally expensive for large problems
-
Several approximate strategies exist
Algorithms
-
Computes the minimizer along steepest descent direction within trust region
-
Step: \(p_k^{SD} = -\alpha \nabla f_k\) where \(\alpha > 0\)
-
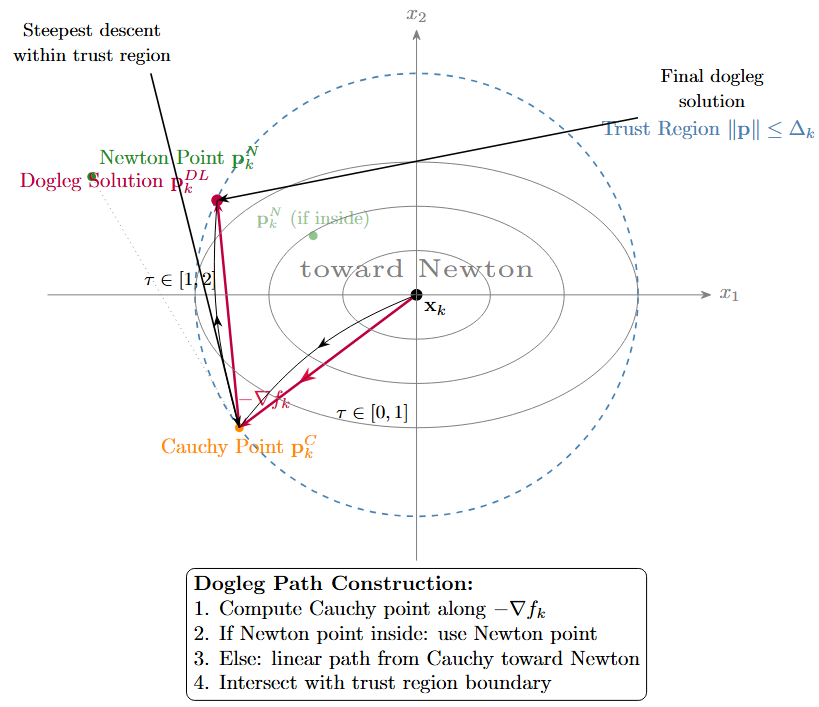
Cauchy point: \(p_k^C = -\tau_k \frac{\Delta_k}{\|\nabla f_k\|} \nabla f_k\)
where \(\tau_k = \min\left(1, \frac{\|\nabla f_k\|^3}{\Delta_k \nabla f_k^T B_k \nabla f_k}\right)\) if \(\nabla f_k^T B_k \nabla f_k > 0\)
-
Properties:
-
Inexpensive to compute: \(O(n)\) operations
-
Global convergence guaranteed
-
Often used as fallback in more sophisticated methods
-
Provides lower bound on improvement
-
Dogleg Method
Requirements: \(B_k\) positive definite
Two key points:
-
Cauchy point: \(p_k^C\)
-
Newton point: \(p_k^N = -B_k^{-1}\nabla f_k\)
Dogleg path:
-
If \(\|p_k^N\| \leq \Delta_k\): return \(p_k^N\)
-
Else: linear combination
\[p_k(\tau) = \begin{cases} \tau p_k^C & 0 \leq \tau \leq 1\\ p_k^C + (\tau-1)(p_k^N - p_k^C) & 1 \leq \tau \leq 2 \end{cases}\]
Subspace Minimization (Steihaug-Toint)
-
Also known as truncated conjugate gradient method
-
Minimizes model over Krylov subspace:
\[\mathcal{K}_j = \text{span}\{\nabla f_k, B_k\nabla f_k, \ldots, B_k^{j-1}\nabla f_k\}\] -
Algorithm terminates when:
-
Conjugate gradient converges
-
Trust region boundary reached
-
Negative curvature detected
-
-
Advantages:
-
Handles indefinite \(B_k\) gracefully
-
Better than dogleg for indefinite problems
-
Scales well to large problems
-
Convergence
Theorem: Global Convergence
Under standard assumptions (continuous derivatives, bounded level sets), trust region methods converge to a stationary point:
Local Convergence Rates
-
Linear convergence: Always guaranteed
-
Superlinear convergence: When \(B_k \approx \nabla^2 f(x_k)\) and \(\Delta_k\) eventually inactive
-
Quadratic convergence: When \(B_k = \nabla^2 f(x_k)\) exactly
Key Assumption
The model \(m_k(p)\) provides sufficient decrease compared to Cauchy point
Adaptive Radius Adjustment
-
Critical for practical performance
-
Based on ratio of actual to predicted reduction:
\[\rho_k = \frac{f(x_k) - f(x_k + p_k)}{m_k(0) - m_k(p_k)} = \frac{\text{ared}_k}{\text{pred}_k}\] -
Radius update rules:
-
\(\rho_k < \eta_1\): Poor model, decrease radius
\[\Delta_{k+1} = \gamma_1 \|p_k\|, \quad \gamma_1 \in (0, 1)\] -
\(\eta_1 \leq \rho_k < \eta_2\): Acceptable model, keep radius
\[\Delta_{k+1} = \Delta_k\] -
\(\rho_k \geq \eta_2\): Good model, possibly increase radius
\[\Delta_{k+1} = \min(\gamma_2 \Delta_k, \Delta_{\max}) \text{ if } \|p_k\| = \Delta_k\]
-
Typical values: \(\eta_1 = 0.25\), \(\eta_2 = 0.75\), \(\gamma_1 = 0.5\), \(\gamma_2 = 2\)
Hessian Approximations
Exact Hessian
-
\(B_k = \nabla^2 f(x_k)\)
-
Best convergence properties
-
Expensive to compute and store for large \(n\)
Quasi-Newton Methods
-
BFGS: \(B_{k+1} = B_k + \frac{y_k y_k^T}{y_k^T s_k} - \frac{B_k s_k s_k^T B_k}{s_k^T B_k s_k}\)
-
SR1: \(B_{k+1} = B_k + \frac{(y_k - B_k s_k)(y_k - B_k s_k)^T}{(y_k - B_k s_k)^T s_k}\)
-
Limited memory versions: L-BFGS, L-SR1
Other Approximations
-
Finite differences
-
Identity matrix: \(B_k = I\) (steepest descent)
-
Scaled identity: \(B_k = \sigma_k I\)
Applications
-
Chemical engineering: Parameter estimation in complex reaction models
-
Computer vision: Bundle adjustment in 3D reconstruction
-
Machine learning: Training deep neural networks (alternative to Adam/SGD)
-
Economics: Calibration of large-scale macroeconomic models
-
Computational physics: Molecular geometry optimization
-
Structural optimization: Design of mechanical components
-
Data fitting: Nonlinear regression with outliers
Advantages in Practice
-
More robust than line search for non-convex problems
-
Handles indefinite Hessians gracefully
-
Automatic step size control via radius adjustment
-
Good performance even with approximate Hessians
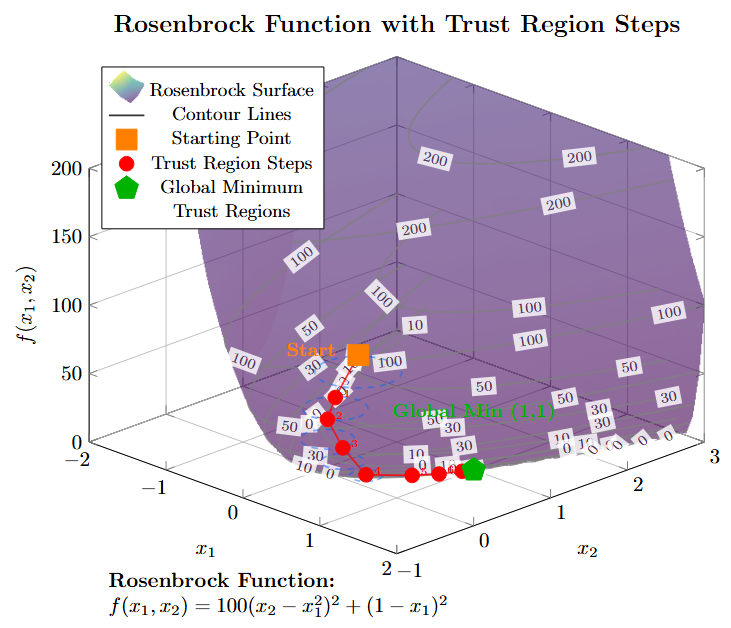
Example: Rosenbrock Function
-
Classic test problem:
\[f(x,y) = (a-x)^2 + b(y-x^2)^2\] -
Standard values: \(a=1\), \(b=100\)
-
Highly nonlinear, curved valley
-
Challenges:
-
Ill-conditioned Hessian
-
Narrow curved valley
-
Global minimum at \((1,1)\)
-
-
Trust region adapts step size automatically in different regions
Implementation Considerations
Computational Efficiency
-
Use matrix factorizations (Cholesky, eigenvalue decomposition)
-
Implement iterative methods for large-scale problems
-
Consider limited-memory quasi-Newton methods
Numerical Stability
-
Handle near-singular systems carefully
-
Use regularization when \(B_k\) is indefinite
-
Monitor condition numbers
Parameter Tuning
-
Initial trust region radius: \(\Delta_0 = 0.1 \cdot \|x_0\|\) or \(\Delta_0 = 1\)
-
Conservative radius updates for noisy functions
-
Problem-specific termination criteria
Conclusion
-
Trust region methods provide robust optimization framework
-
Key features:
-
Local model constrained to trust region
-
Adaptive radius control based on model quality
-
Global convergence guarantees
-
Handle indefinite Hessians naturally
-
-
Solution strategies range from simple (Cauchy point) to sophisticated (Steihaug-Toint)
-
Particularly valuable for:
-
Non-convex problems
-
Problems with indefinite Hessians
-
Cases where line search struggles
-
Noisy objective functions
-
Future Directions
-
Adaptive model selection
-
Trust region methods for constrained optimization
-
Stochastic trust region methods