Demonstrative Video
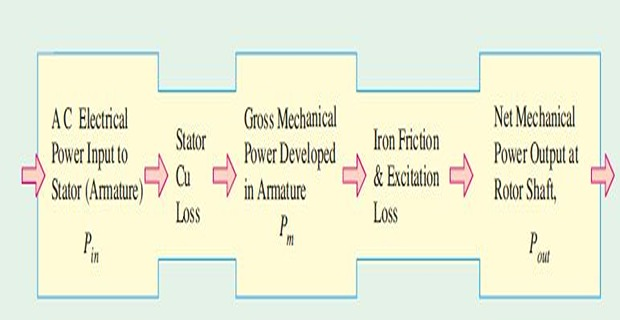
Power Flow within Synchronous Motor
Cu loss in rotor is not met by motor ac input, but by the dc source used for rotor excitation
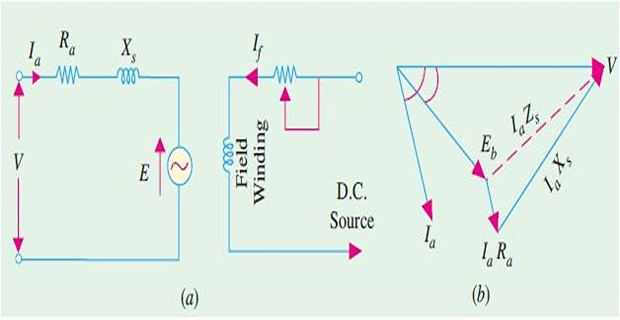
for one armature phase of a syn motor:
Power developed by Synchronous Motor
Since, \(X_s >> R_a\)
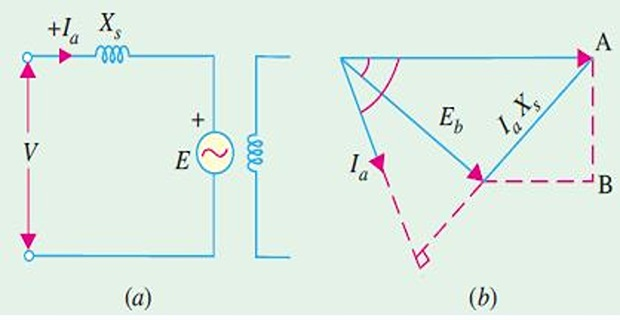
Since, stator Cu losses is neglected, \(P_{in}=P_m\)
Torques of a Synchronous Motor
\(T_d\) when full voltage is applied to stator winding
also called breakaway torque
10% of F.L torque in centrifugal pumps to 200% loaded reciprocating compressors
\(T_d\) developed in running condition
determined by horse-power and speed of the driven machine
must have a running torque greater than the maximum torque required in order to avoid stalling
Syn motor is started as IM till it runs 2 to 5% below \(N_s\)
Afterwards, excitation is switched on and the rotor pulls into step with synchronously rotating stator field
Torque at which the motor will pull into step is called pull-in torque
\(T_{max}\) can develop without pulling out of step or synchronism