Demonstrative Video
- Gross-Mechanical Power Developed:
SECTION 01
Max Power Output: Optimizing 3-Phase Induction Motors
Key Concepts
\[\begin{aligned}
P_{m} & =P_{2}-P_{c}\\
&
=\dfrac{3\left(I_{2r}^{'}\right)^{2}R_{2}^{'}}{s}-3\left(I_{2r}^{'}\right)^{2}R_{2}^{'}\\
&
=3\left(I_{2r}^{'}\right)^{2}R_{2}^{'}\left(\dfrac{1-s}{s}\right)
\end{aligned}\]
Torque Developed:
- Torque Developed:
\[\begin{aligned}
T &
=\dfrac{P_{m}}{\omega}=\dfrac{3\left(I_{2r}^{'}\right)^{2}R_{2}^{'}\left(\dfrac{1-s}{s}\right)}{\dfrac{2\pi
N}{60}}\\
&
=\dfrac{3\left(I_{2r}^{'}\right)^{2}R_{2}^{'}\left(\dfrac{1-s}{s}\right)}{\dfrac{2\pi
N_{s}\left(1-s\right)}{60}} \\
&
=9.55\times\dfrac{\dfrac{3\left(I_{2r}^{'}\right)^{2}R_{2}^{'}}{s}}{N_{s}}
\end{aligned}\]
Maximum Power Output:
- Maximum Power Output:
On further simplifying the approximate equivalent circuit
exciting circuit is omitted i.e. \(I_0\) is neglected
\(K\) is assumed unity
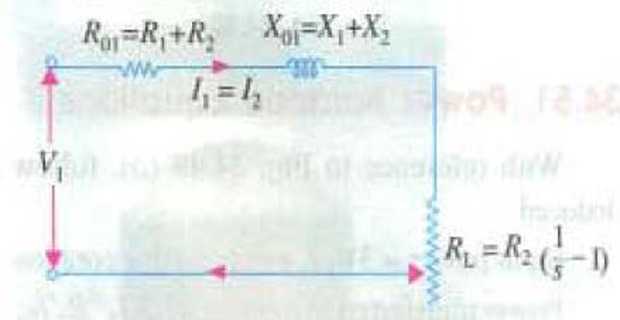
Key Concepts
- Gross-power is given by\[\begin{aligned} P_{g} & =3I_{1}^{2}R_{L}\\ & =3\left[\dfrac{V_{1}}{\sqrt{\left(R_{01}+R_{L}\right)^{2}+X_{01}^{2}}}\right]^{2}R_{L}\\ & =\dfrac{3V_{1}^{2}R_{L}}{\left(R_{01}+R_{L}\right)^{2}+X_{01}^{2}} \end{aligned}\]
Key Concepts
- The condition for maximum power output is obtained by differentiating and equating with zero, we get\[\begin{aligned} R_{L}^{2} & =R_{01}^{2}+X_{01}^{2}\\ & =Z_{01}^{2}\\ \Rightarrow R_{L} & =Z_{01} \end{aligned}\]
Hence, power is maximum when the equivalent load resistance is equal to the standstill leakage impedance of the motor
Corresponding slip:
Corresponding slip:
\[\begin{aligned}
Z_{01} & =R_{L}=R_{2}\left[\left(1/s\right)-1\right]\\
& \Rightarrow s=\dfrac{R_{2}}{R_{2}+Z_{01}}\\
P_{m,max} &
=\dfrac{3V_{1}^{2}Z_{01}}{\left(R_{01}+Z_{01}\right)^{2}+X_{01}^{2}}\\
& =\dfrac{3V_{1}^{2}}{2\left(R_{01}+Z_{01}\right)}
\end{aligned}\]