Demonstrative Video
\(R_a\): Armature Resistance or Rheostatic Control
\(\Phi\): Field Flux Control
\(V\): Variation in applied voltage
Armature Resistance Control
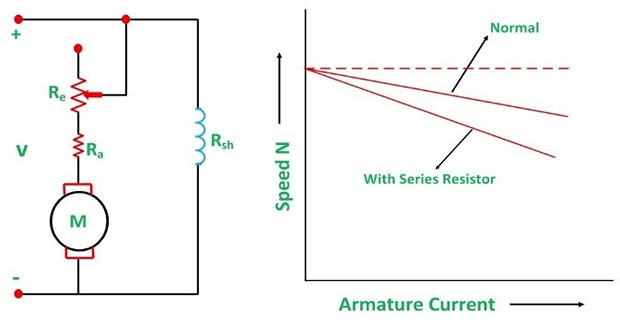
The variation in the variable resistance does not effect the flux as the field is directly connected to the supply mains.
By varying \(R_a\), the \(I\) and \(\Phi\) both are affected. The voltage drop in the variable resistance \(V \downarrow\) to the armature, and as a result, the \(N \downarrow\).
When \(R_e \uparrow\), the motor runs at a lower speed. Since the variable resistance carries full armature current, it must be designed to carry continuously the full armature current.
A large amount of power is wasted in the external resistance
Restricted to keep the speed below the normal speed of the motor and increase in the speed above normal level is not possible by this method.
For a given value of variable resistance, the speed reduction is not constant but varies with the motor load.
used only for small motors
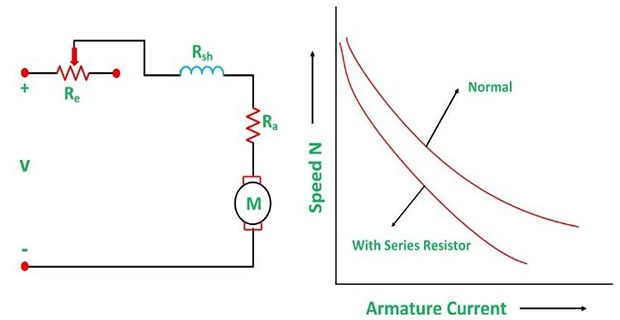
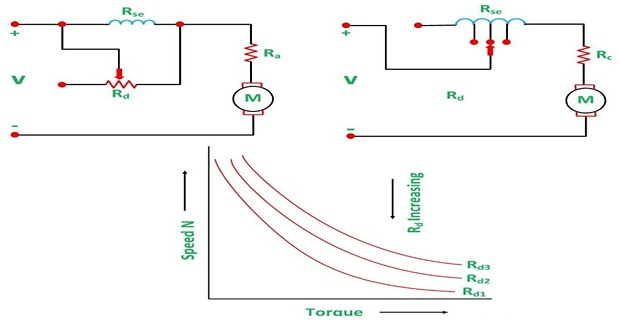
Field Flux Control
Method is used to correct the fall of speed because of load
: By using a Diverter (\(I_f \downarrow \Rightarrow \Phi \downarrow \Rightarrow N \uparrow\)) or Tapped field control (ampere-turns is varied by varying \(N_{se}\))
This method is easy and convenient.
As the shunt field is very small, the power loss in the shunt field is also small.
Flux cannot be increased beyond its normal values because of the saturation of the iron
Therefore, speed control by flux is limited to the weakening of the field, which gives an increase in speed.
Applicable over only to a limited range because if the field is weakened too much, there is a loss of stability.
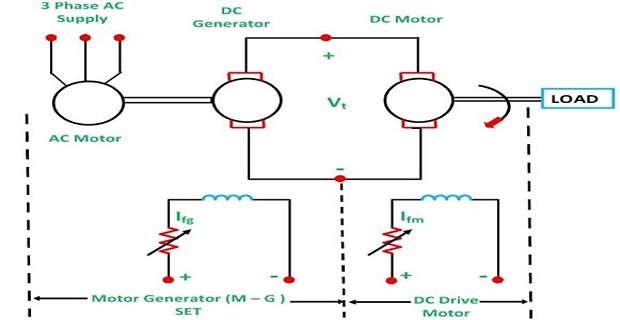
This speed control method is also known as Ward Leonard Method