Demonstrative Video
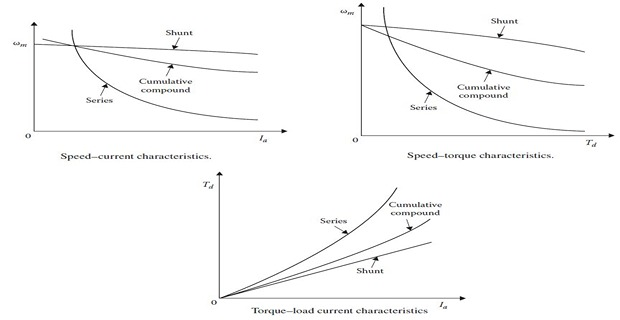
Motor Characteristics
\(T_a/I_a \Rightarrow\) Electrical Char.
\(N/I_a\)
\(N/T_a \Rightarrow\) Mechanical Characteristics
Torque and armature current
Speed and armature current
Speed and Torque
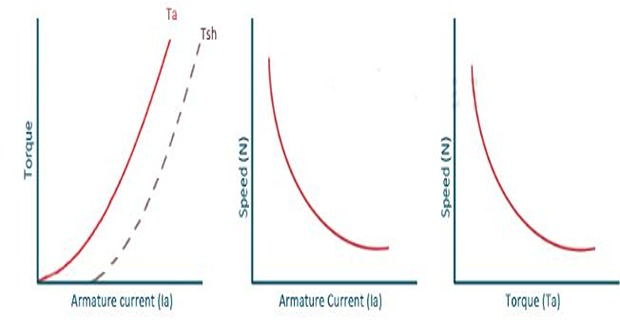
Before magnetic saturation \(T_a \propto I_a^2 \Rightarrow\) Parabola
After magnetic saturation \(T_a \propto I_a \Rightarrow\) Straight Line
\(T_{sh} < T_a\) due to Stray losses
Motors are used where high \(T_{st}\) required
Small load \(\Rightarrow I_a \downarrow \Rightarrow E_b\) is small and neglected \(N\propto E_{b}/\Phi\propto1/\Phi\propto1/I_{a}\)
\(I_a \downarrow \downarrow \Rightarrow N \uparrow \uparrow \Rightarrow\) don’t start no mechanical load\(^\ast\)
\(N \uparrow T_a \downarrow\)
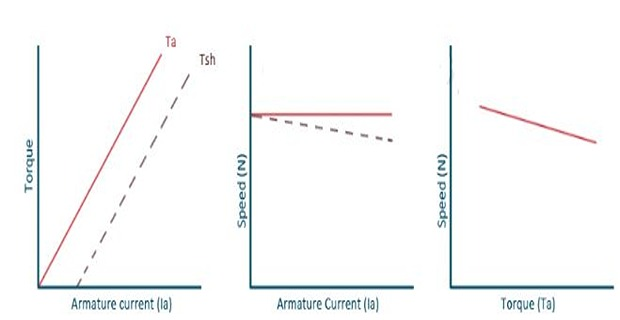
\(\Phi =\) constant. At heavy load \(\Phi \downarrow\) slightly due to armature reaction
\(T_a \propto I_a \Rightarrow\) Straight line
Since, heavy starting load needs \(I_{st} \uparrow\uparrow\), shunt motors never be started on heavy load
\(N\propto E_b \Rightarrow N =\) constant as \(E_b\) is constant
With load, \(E_b \downarrow\) slightly more than \(\Phi \Rightarrow N \downarrow\) slightly
Therefore, shunt motors are constant speed motors
Characteristics of Compound Motor
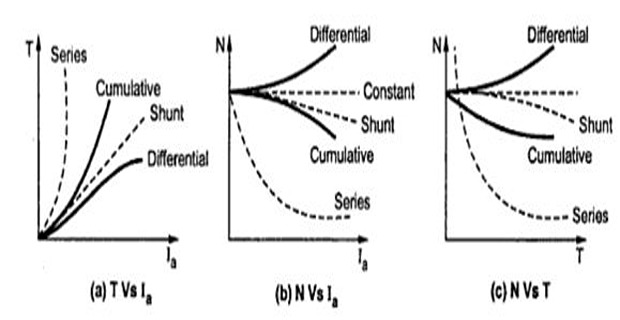
develops large \(T\) at low \(N\) just like series motor.
No disadvantages of series motor at light or no load.
\(\Phi_{se}\) helps \(\Phi_{sh}\) to \(\uparrow\) \(\Phi_T\). Hence runs at reasonable speed.
Differential compound motor
As two fluxes opposes, resultant flux \(\downarrow\) as load increases, machine runs at a higher speed with increase in the load.
Try to run with dangerously high speed at full load.
Generally not used in practice.